Other Parts Discussed in Thread: C2000WARE
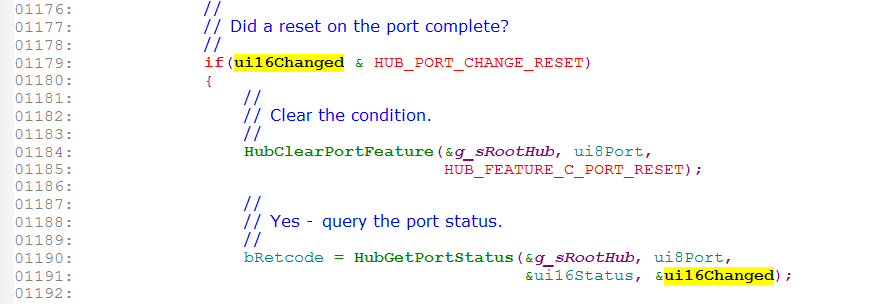
We designed TMS320F28377D with a USB hub in a new project. Resetting the port of USB hub can't be completed when
we brought up it. The code stopped at the point of reseting port of USB as the figures shown in below.