Hi everyone,
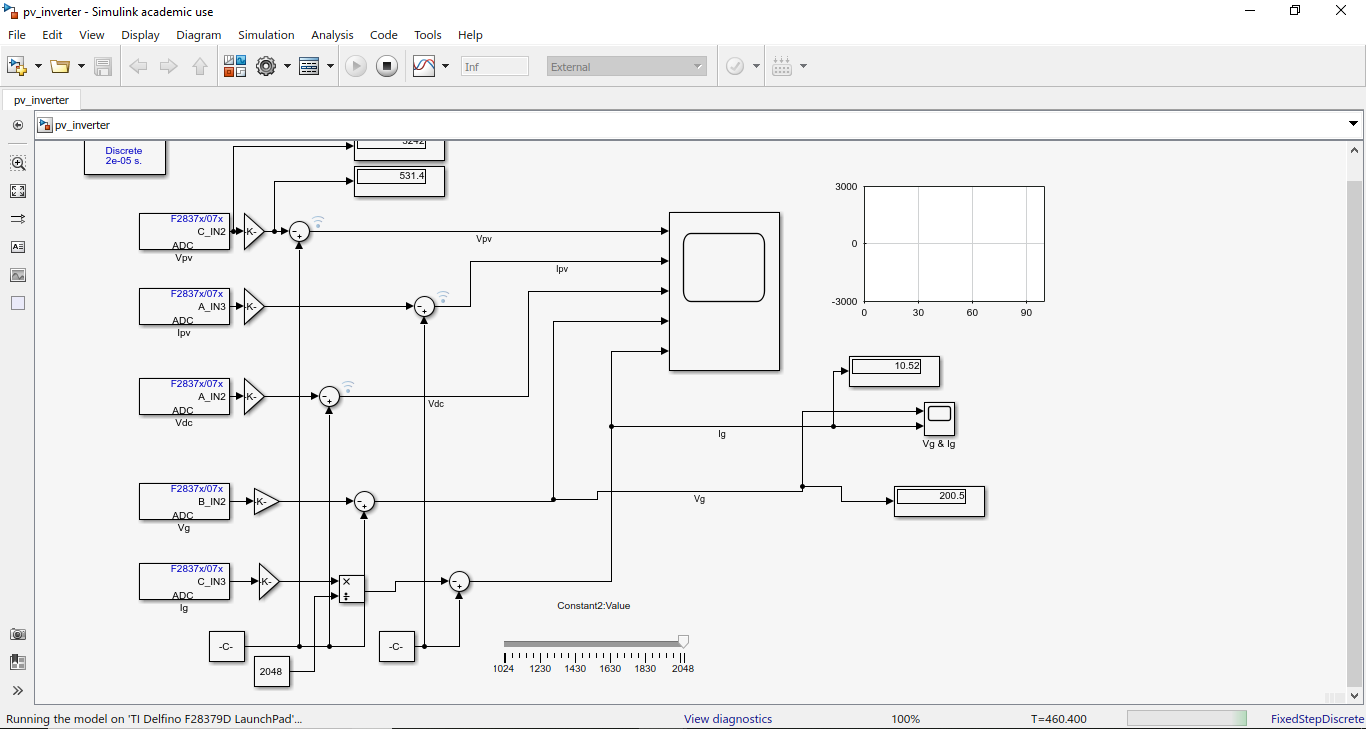
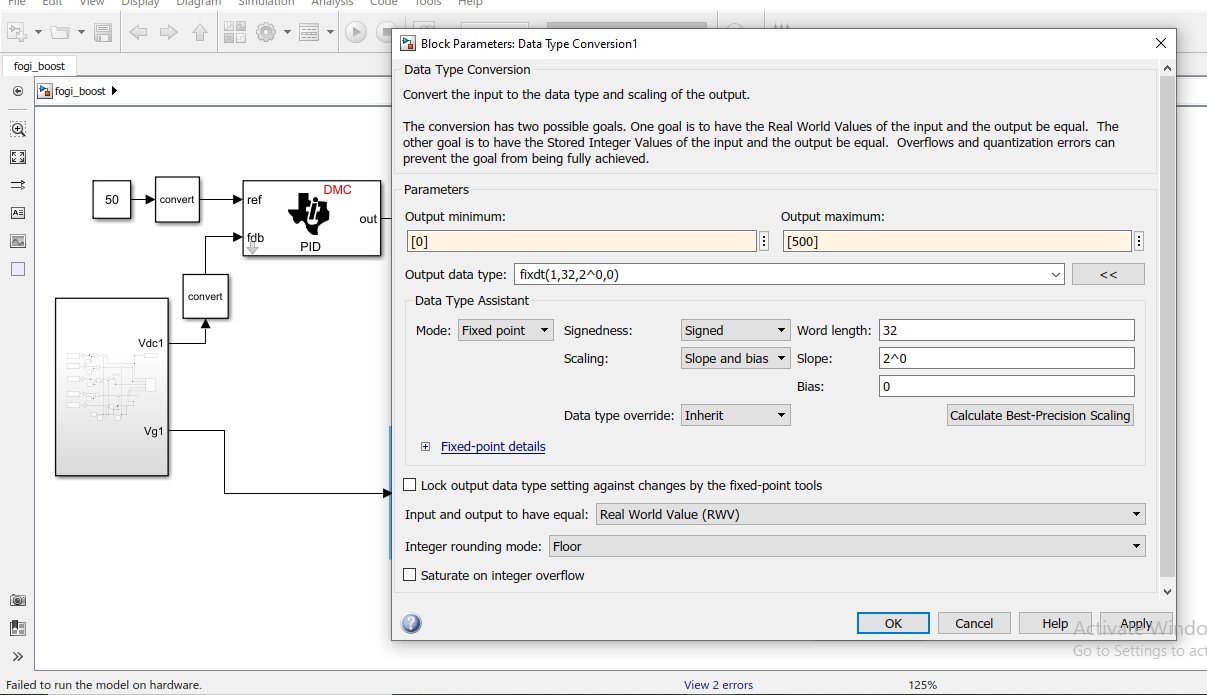
I am working with Development Kit TMS320F28379D with Matlab 2018a and code composer studio 8.1.0 to generate code and direct implement on target. I have a problem while working on real time implementation for signal extraction from ADC of this kit. In ADC setting, sampling time is set as defined sampling time (Ts= 20μs) model is terminate after some time in external mode, while sample time is replaced by inherent sample time = -1. Then system is run for long time, but problem is that actual signal frequency is 50Hz but from scope it does not meet its frequency. Please suggest me what is mistake is going on by me and provide me solutions.
I have another doubt about hardware interrupt block is it required or not for implement real time implementations (In external mode) please suggested me.