Other Parts Discussed in Thread: BOOSTXL-DRV8320RS, MOTORWARE, INA240, TMS320F280049C
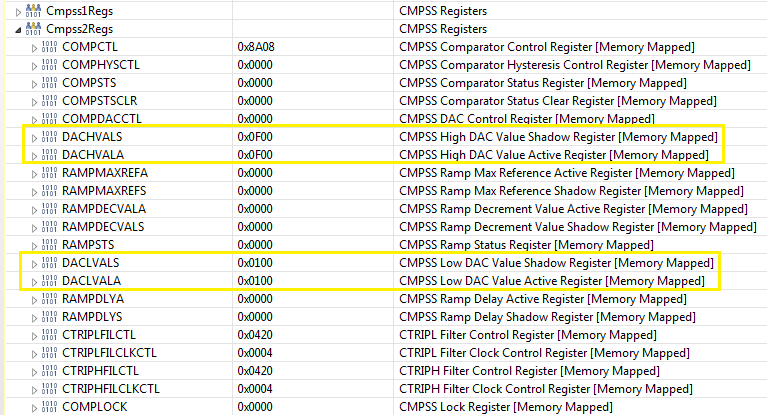
The debug register refresh DACHVAL DACHLVAL load value changes after a Trip zone event occurs and never reloads the init values. I notice the DC filer sample clock value 0x100 (256) but not the DACLVALS 4048 and 0xF00 (3840) DACHVLA has changed the init value 0xFD0. This occurs on all 3 CMPSSx. The initial load values 0xFD0 are correct but only after MCU reset is forced via CCS debug.
Any idea why CCS register DACH/L values are not reloading after a PWM trip event or why they are changing? Perhaps this issue leads to frequent annoying low side DAC filter faults?
// Set the initial value to half of ADC range
uint16_t cmpsaDACH = 4048;//2048
uint16_t cmpsaDACL = 4048;//2048
// define these numbers in hal.h
//
CMPSS_setDACValueHigh(obj->cmpssHandle[cnt], cmpsaDACH);
CMPSS_setDACValueLow(obj->cmpssHandle[cnt], cmpsaDACL);