
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Hi Everyone,
I’m setting up a TMS320F28069 as an I2C Slave, using “Example_2806xI2C_eeprom.c” as a starting point.
The TMS320F28069 is talking to a TMS320F28379, which is acting as master. It's running a version of “i2c_ex1_loopback.c”, which has been modified to transmit requests for data over I2C and act accordingly to slave responses.
In this phase of the project, I’m using a LaunchXL-F28069M and a LaunchXL-F28379D to develop the software before integrating it into the target product. The target product, which contains a TMS320F28069PNT, has been in production for several years, so this project is simply adding I2C communications to an existing product. Here's a picture of the development setup for a visual: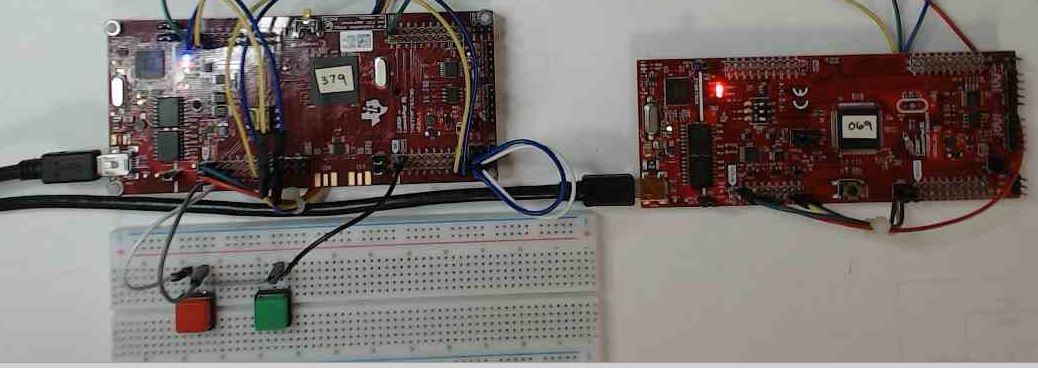
The extent of required communications is this:
This is all pretty simple in concept, but I’m having a hard time wrapping my mind around the on-board I2C hardware and example software.
At the moment, the master has two GPIOs configured as inputs, each having pull-ups and go low when corresponding buttons are pressed. When button 1 is pressed, the master transmits a request (0x01) that the slave interprets and responds with 4 data bytes (0x1a, 0x2b, 0x3c, & 0x4d). When button 2 is pressed (0x02), the slave responds with 4 different data bytes (0x5e, 0x6f, 0x7a, 0x8b). The transactions follow this sequence:
Then it immediately sends a dummy byte (without a stop condition):
Next, it sends a read command:
Here are logic analyzer images that show what I'm talking about:
When button 1 is pressed:

When button 2 is pressed:

Here is the master code running on the LaunchXL-F28379D:
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
//
// Defines
//
#define MASTER_ADDRESS 0x29
#define SLAVE_ADDRESS 0x28
#define MICRO_SECONDS_10 5
#define MICRO_SECONDS_50 25
#define MICRO_SECONDS_100 50
#define MICRO_SECONDS_150 75
#define MICRO_SECONDS_200 100
#define MICRO_SECONDS_250 125
#define MICRO_SECONDS_300 150
#define MICRO_SECONDS_350 175
#define MICRO_SECONDS_400 200
#define MICRO_SECONDS_450 225
#define MICRO_SECONDS_500 250
#define MICRO_SECONDS_1500 750
#define MILLI_SECONDS_10 5000
#define MILLI_SECONDS_3500 1750000
#define MILLI_SECONDS_5000 2500000
#define SECONDS_7 3500000
#define SEND_1_BYTE 1
#define SEND_2_BYTES 2
#define SEND_3_BYTES 3
#define SEND_4_BYTES 4
#define SEND_5_BYTES 5
#define SEND_6_BYTES 6
#define SEND_7_BYTES 7
#define SEND_8_BYTES 8
#define SEND_9_BYTES 9
#define SEND_10_BYTES 10
#define SEND_11_BYTES 11
#define SEND_12_BYTES 12
#define SEND_13_BYTES 13
#define SEND_14_BYTES 14
#define SEND_15_BYTES 15
#define SEND_16_BYTES 16
#define SEND_17_BYTES 17
#define SEND_18_BYTES 18
#define SEND_19_BYTES 19
#define SEND_20_BYTES 20
//
// Globals
//
uint16_t sData[32]; // Send data buffer
uint16_t rData[32]; // Receive data buffer
uint16_t backLightBrightness = 1;
uint16_t returnData;
//uint32_t loopCounter = 0; // This counter is used in the main loop
uint32_t loopCounter = 19999900; // Set hi, so first I2C transmit happens quickly
uint16_t captureBuffer[32];
int captureBufferIndex;
int switchState_PID;
int switchState_FWV;
//
// Function Prototypes
//
void initI2CFIFO(void);
__interrupt void i2cFIFOISR(void);
uint16_t I2C_Write(uint32_t base, uint16_t *data, uint16_t data_length, uint32_t delay_us);
uint16_t I2C_Write(uint32_t base, uint16_t *data, uint16_t data_length, uint32_t delay_us)
{
int i;
I2C_sendStartCondition(base);
for (i = 0; i < data_length; i++)
{
I2C_putData(I2CA_BASE, data[i]);
DEVICE_DELAY_US(5);//delete...poll I2C regs to determine when to move forward
}
I2C_sendStopCondition(base);
I2C_setConfig(I2CA_BASE, (I2C_MASTER_SEND_MODE | I2C_REPEAT_MODE));
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP8); // Issue ACK
DEVICE_DELAY_US(delay_us);
return 0;
}
uint16_t I2C_Read(uint32_t base);
uint16_t I2C_Read(uint32_t base)
{
int i_Read;
int data_Length_Read = 1;
int data_Length = 1;
int i;
// This write sequence is needed in addition to I2C_Write()
// I2C_Write() includes a I2C_sendStopCondition(), which can't happen before the reads
I2C_sendStartCondition(base);
I2C_putData(I2CA_BASE, 0xdb);
I2C_setConfig(I2CA_BASE, (I2C_MASTER_SEND_MODE | I2C_REPEAT_MODE));
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP8); // Clears interrupt flags in int group 8
DEVICE_DELAY_US(250); // Insufficient delay here causes the master's NACK to be missed
// Disable/enable I2C module to change SEND/RECEIVE mode
I2C_disableModule(I2CA_BASE);
I2C_setConfig(I2CA_BASE, I2C_MASTER_RECEIVE_MODE | I2C_REPEAT_MODE);
I2C_enableModule(I2CA_BASE);
I2C_sendStartCondition(base);
for (i_Read = 0; i_Read < data_Length_Read; i_Read++)
{
I2C_putData(I2CA_BASE, sData[i_Read]);
DEVICE_DELAY_US(500);//delete...poll I2C regs to determine when to move forward
}
// Disable/enable I2C module to change SEND/RECEIVE mode
I2C_disableModule(I2CA_BASE);
I2C_setConfig(I2CA_BASE, I2C_MASTER_SEND_MODE | I2C_REPEAT_MODE);
I2C_enableModule(I2CA_BASE);
return rData[0];
}
//
// Main
//
void main(void)
{
uint16_t i;
// Initialize device clock and peripherals
Device_init();
// Disable pin locks and enable internal pullups.
Device_initGPIO();
// Initialize GPIOs 0 and 1 for use as SDA A and SCL A respectively
GPIO_setPinConfig(GPIO_0_SDAA); // Was 104
GPIO_setPadConfig(0, GPIO_PIN_TYPE_PULLUP);
GPIO_setQualificationMode(0, GPIO_QUAL_ASYNC);
GPIO_setPinConfig(GPIO_1_SCLA);
GPIO_setPadConfig(1, GPIO_PIN_TYPE_PULLUP);
GPIO_setQualificationMode(1, GPIO_QUAL_ASYNC);
//rdv Setup GPIO to trigger logic analyzer on demand
GPIO_setPadConfig(32, GPIO_PIN_TYPE_STD);
GPIO_setDirectionMode(32, GPIO_DIR_MODE_OUT);
GPIO_writePin(32, 0);
//rdv Setup GPIO for switches to signal data requests on demand
GPIO_setPadConfig(18, GPIO_PIN_TYPE_PULLUP);
GPIO_setDirectionMode(18, GPIO_DIR_MODE_IN);
GPIO_setPadConfig(19, GPIO_PIN_TYPE_PULLUP);
GPIO_setDirectionMode(19, GPIO_DIR_MODE_IN);
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
Interrupt_initModule();
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
Interrupt_initVectorTable();
// Interrupts that are used in this example are re-mapped to ISR functions
// found within this file.
Interrupt_register(INT_I2CA_FIFO, &i2cFIFOISR);
// Set I2C use, initializing it for FIFO mode
initI2CFIFO();
// Initialize the data buffers
for(i = 0; i < 32; i++)
{
sData[i] = 0;
rData[i] = 0;
}
// Enable interrupts required for this example
Interrupt_enable(INT_I2CA_FIFO);
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
EINT;
ERTM;
// Loop forever. Suspend or place breakpoints to observe the buffers.
while(1) //rdv This loops repeats about every 520ns
{
if(loopCounter++ > 100000) // 500,000 = 260ms
{
loopCounter = 0;
switchState_PID = GPIO_readPin(18);
switchState_FWV = GPIO_readPin(19);
if(switchState_PID == 0x00)
{
sData[0] = 0x01;
I2C_Write(I2CA_BASE, sData, SEND_1_BYTE, MICRO_SECONDS_250);
I2C_Read(I2CA_BASE);
sData[0] = 0x00;
}
if(switchState_FWV == 0x00)
{
sData[0] = 02;
I2C_Write(I2CA_BASE, sData, SEND_1_BYTE, MICRO_SECONDS_250);
I2C_Read(I2CA_BASE);
sData[0] = 0x00;
}
}
returnData = rData[0]; // rData[0] is populated in the ISR
}
}
//
// Function to configure I2C A in FIFO mode.
//
void initI2CFIFO()
{
// Must put I2C into reset before configuring it
I2C_disableModule(I2CA_BASE);
// I2C configuration. Use a 400kHz I2CCLK with a 50% duty cycle.
// Actual values to produce precisely 115.2kHz SCL @ 35% dutycycle
HWREGH(I2CA_BASE + I2C_O_PSC) = I2C_PSC_IPSC_M & 16;
HWREGH(I2CA_BASE + I2C_O_CLKH) = 13;
HWREGH(I2CA_BASE + I2C_O_CLKL) = 28;
I2C_setConfig(I2CA_BASE, (I2C_MASTER_SEND_MODE | I2C_REPEAT_MODE));
I2C_setDataCount(I2CA_BASE, 4);
I2C_setBitCount(I2CA_BASE, I2C_BITCOUNT_8);
// Configure for external mode (no loopback)
I2C_setSlaveAddress(I2CA_BASE, SLAVE_ADDRESS);
I2C_setOwnSlaveAddress(I2CA_BASE, MASTER_ADDRESS);
I2C_disableLoopback(I2CA_BASE);
I2C_setEmulationMode(I2CA_BASE, I2C_EMULATION_FREE_RUN /*I2C_EMULATION_STOP_SCL_LOW*/);
// FIFO and interrupt configuration
I2C_enableFIFO(I2CA_BASE);
I2C_clearInterruptStatus(I2CA_BASE, I2C_INT_RXFF | I2C_INT_TXFF);
I2C_setFIFOInterruptLevel(I2CA_BASE, I2C_FIFO_TX1, I2C_FIFO_RX4);
I2C_enableInterrupt(I2CA_BASE, I2C_INT_RXFF | I2C_INT_TXFF);
// Configuration complete. Enable the module.
I2C_enableModule(I2CA_BASE);
}
//
// I2C A Transmit & Receive FIFO ISR.
//
__interrupt void i2cFIFOISR(void)
{
uint16_t i;
// If receive FIFO interrupt flag is set, read data
if((I2C_getInterruptStatus(I2CA_BASE) & I2C_INT_RXFF) != 0)
{
uint16_t bytes_Received;
bytes_Received = I2C_getRxFIFOStatus(I2CA_BASE);
I2C_setDataCount(I2CA_BASE, bytes_Received);
for(i = 0; i < bytes_Received; i++)
{
rData[i] = I2C_getData(I2CA_BASE);
if(rData[i] != 0x00)
{
captureBufferIndex &= 0x1f;
captureBuffer[captureBufferIndex++] = rData[i];
DEVICE_DELAY_US(1);
}
}
I2C_sendNACK(I2CA_BASE);
// Clear interrupt flag
I2C_clearInterruptStatus(I2CA_BASE, I2C_INT_RXFF);
Example_PassCount++;
}
// If transmit FIFO interrupt flag is set, put data in the buffer
else if((I2C_getInterruptStatus(I2CA_BASE) & I2C_INT_TXFF) != 0)
{
//
}
// Issue ACK
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP8);
}
//
// End of File
//Here's the slave code running on the LauchXL-F28069M:
//
// Included Files
//
#include "DSP28x_Project.h" // Device Headerfile and Examples Include File
//
// Note: I2C Macros used in this example can be found in the
// F2806x_I2C_defines.h file
//
//
// Function Prototypes
//
void I2CA_Init(void);
Uint16 I2CA_WriteData(struct I2CMSG *msg);
Uint16 I2CA_ReadData(struct I2CMSG *msg);
__interrupt void i2c_int1a_isr(void);
void pass(void);
void fail(void);
//
// Defines
//
#define I2C_SLAVE_ADDR 0x28
#define I2C_MASTER_ADDR 0x30
#define I2C_NUMBYTES 2
#define I2C_EEPROM_HIGH_ADDR 0x00
#define I2C_EEPROM_LOW_ADDR 0x00
#define I2CA_BASE 0x7900
#define MICRO_SECONDS_10 10
#define MICRO_SECONDS_50 50
#define MICRO_SECONDS_100 100
#define MICRO_SECONDS_150 150
#define MICRO_SECONDS_200 200
#define MICRO_SECONDS_250 250
#define MICRO_SECONDS_300 300
#define MICRO_SECONDS_350 350
#define MICRO_SECONDS_400 400
#define MICRO_SECONDS_450 450
#define MICRO_SECONDS_500 500
#define MICRO_SECONDS_1500 1500
#define MILLI_SECONDS_10 10000
#define MILLI_SECONDS_3500 3500000
#define MILLI_SECONDS_5000 5000000
#define SECONDS_7 7000000
#define SEND_1_BYTE 1
#define SEND_2_BYTES 2
#define SEND_3_BYTES 3
#define SEND_4_BYTES 4
#define SEND_5_BYTES 5
#define SEND_6_BYTES 6
#define SEND_7_BYTES 7
#define SEND_8_BYTES 8
#define SEND_9_BYTES 9
#define SEND_10_BYTES 10
#define SEND_11_BYTES 11
#define SEND_12_BYTES 12
#define SEND_13_BYTES 13
#define SEND_14_BYTES 14
#define SEND_15_BYTES 15
#define SEND_16_BYTES 16
#define SEND_17_BYTES 17
#define SEND_18_BYTES 18
#define SEND_19_BYTES 19
#define SEND_20_BYTES 20
//
// Globals
//
// Two bytes will be used for the outgoing address,
// thus only setup 14 bytes maximum
//
struct I2CMSG I2cMsgOut={I2C_MSGSTAT_SEND_WITHSTOP,
I2C_SLAVE_ADDR,
I2C_NUMBYTES,
I2C_EEPROM_HIGH_ADDR,
I2C_EEPROM_LOW_ADDR,
0xfe, // Msg Byte 1
0x37}; // Msg Byte 2
struct I2CMSG I2cMsgIn1={ I2C_MSGSTAT_SEND_NOSTOP,
I2C_SLAVE_ADDR,
I2C_NUMBYTES,
0x00,
0x00};
struct I2CMSG *CurrentMsgPtr; // Used in interrupts
Uint16 PassCount;
Uint16 FailCount;
unsigned long index = 10000000;
unsigned int sData[32]; // Send data buffer
unsigned int rData[32]; // Receive data buffer
unsigned int dataCopiedFromI2CDRR; // Received data
unsigned int backLightBrightness = 1;
unsigned int returnData;
unsigned long loopCounter = 0; // This counter is used in the main loop
unsigned long OxfaCounter = 0;
unsigned long qtyOfReceiveInterrupts = 0;
unsigned int captureBuffer[32];
int captureBufferIndex = 0;
unsigned int I2C_Write(unsigned long base, unsigned int *data, unsigned int data_length, unsigned long delay_us);
unsigned int I2C_Write(unsigned long base, unsigned int *data, unsigned int data_length, unsigned long delay_us)
{
unsigned int i;
// Setup I2C module for SEND/RECEIVE mode
I2caRegs.I2CMDR.bit.IRS = 0; //rdv Put I2C module in reset while making changes
I2caRegs.I2CMDR.bit.MST = 0; //rdv Set master mode
I2caRegs.I2CMDR.bit.TRX = 1; //rdv Set transmit mode
I2caRegs.I2CMDR.bit.RM = 1; //rdv Set repeat mode
I2caRegs.I2CMDR.bit.IRS = 1; //rdv I2C module is re-enabled after making changes
//I2C_sendStartCondition(base);
// I2caRegs.I2CMDR.bit.STT = 1; //rdv Slaves DO NOT send start/stop commands
for (i = 0; i < data_length; i++)
{
// I2C_putData(I2CA_BASE, data[i]);
I2caRegs.I2CDXR = data[i];
DELAY_US(50);//delete...poll I2C regs to determine when to move forward
}
//I2C_sendStopCondition(base);
// I2caRegs.I2CMDR.bit.STP = 1; //rdv Slaves DO NOT send start/stop commands
//Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP8); // Issue ACK
PieCtrlRegs.PIEACK.bit.ACK8 = 1; //rdv Issue ACK
DELAY_US(delay_us);
return 0;
}
unsigned int I2C_Read(unsigned long base);
unsigned int I2C_Read(unsigned long base)
{
// Setup SEND/RECEIVE mode
I2caRegs.I2CMDR.bit.IRS = 0; //rdv Put I2C module in reset while making changes
I2caRegs.I2CMDR.bit.NACKMOD = 0;
I2caRegs.I2CMDR.bit.FREE = 1;
I2caRegs.I2CMDR.bit.MST = 0; //rdv Set master mode
I2caRegs.I2CMDR.bit.TRX = 0; //rdv Set receive mode
I2caRegs.I2CMDR.bit.RM = 0; //rdv Set repeat mode
I2caRegs.I2CMDR.bit.IRS = 1; //rdv I2C module is re-enabled after making changes
return rData[0];
}
//
// Main/
//
void main(void)
{
Uint16 i;
CurrentMsgPtr = &I2cMsgOut;
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2806x_SysCtrl.c file.
InitSysCtrl();
// Step 2. Initalize GPIO:
// This example function is found in the F2806x_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
// Setup only the GP I/O only for I2C functionality
InitI2CGpio();
EALLOW;
GpioCtrlRegs.GPAMUX1.bit.GPIO12 = 0;
GpioCtrlRegs.GPADIR.bit.GPIO12 = 1; //rdv Output = 1
GpioCtrlRegs.GPAPUD.bit.GPIO12 = 0; //rdv Pullup enabled = 0
EDIS;
GpioDataRegs.GPASET.bit.GPIO12 = 1; //rdv Take GPIO output high
GpioDataRegs.GPACLEAR.bit.GPIO12 = 1; //rdv Take GPIO output low
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
DINT;
// Initialize PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the F2806x_PieCtrl.c file.
InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2806x_DefaultIsr.c.
// This function is found in F2806x_PieVect.c.
InitPieVectTable();
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
EALLOW; // This is needed to write to EALLOW protected registers
PieVectTable.I2CINT1A = &i2c_int1a_isr;
EDIS; // This is needed to disable write to EALLOW protected registers
// Step 4. Initialize all the Device Peripherals:
// This function is found in F2806x_InitPeripherals.c
I2CA_Init();
// Step 5. User specific code
// Clear Counters
PassCount = 0;
FailCount = 0;
// Clear incoming message buffer
for (i = 0; i < I2C_MAX_BUFFER_SIZE; i++)
{
I2cMsgIn1.MsgBuffer[i] = 0x0000;
}
// Enable I2C interrupt 1 in the PIE: Group 8 interrupt 1
PieCtrlRegs.PIEIER8.bit.INTx1 = 1;
// Enable CPU INT8 which is connected to PIE group 8
IER |= M_INT8;
EINT;
// Initialize the data buffers
for(i = 0; i < 32; i++)
{
sData[i] = 0;
rData[i] = 0;
captureBuffer[i] = 0;
}
DELAY_US(10);
// Init return message.
sData[0] = 0x1a;
sData[1] = 0x2b;
sData[2] = 0x3c;
sData[3] = 0x4d;
sData[4] = 0x5e;
sData[5] = 0x6f;
sData[6] = 0x7a;
sData[7] = 0x8b;
//
// Application loop
//
for(;;)
{
loopCounter++;
if(loopCounter == 100)
{
loopCounter = 0;
returnData = dataCopiedFromI2CDRR; // rData[0] is populated in the ISR
if(returnData == 0x01) // If this slave module has been queried, then respond...
{
GpioDataRegs.GPASET.bit.GPIO12 = 1; //rdv Take GPIO output high
int i;
dataCopiedFromI2CDRR = returnData = 0x99;
// Setup I2C module modes
I2caRegs.I2CMDR.bit.IRS = 0; //rdv Put I2C module in reset while making changes
I2caRegs.I2CMDR.bit.MST = 0; //rdv 0 = slave mode
I2caRegs.I2CMDR.bit.TRX = 1; //rdv 1 = transmit mode
I2caRegs.I2CMDR.bit.RM = 0; //rdv 1 = repeat mode
I2caRegs.I2CMDR.bit.IRS = 1; //rdv I2C module is re-enabled after making changes
I2caRegs.I2CDXR = sData[0]; //rdv Loads a value into the data xmit buffer, starting the xmit process
I2caRegs.I2CDXR = sData[1]; //rdv Loads a value into the data xmit buffer, starting the xmit process
I2caRegs.I2CDXR = sData[2]; //rdv Loads a value into the data xmit buffer, starting the xmit process
I2caRegs.I2CDXR = sData[3]; //rdv Loads a value into the data xmit buffer, starting the xmit process
PieCtrlRegs.PIEACK.bit.ACK8 = 1; //rdv Issue ACK
GpioDataRegs.GPACLEAR.bit.GPIO12 = 1; //rdv Take GPIO output low
DELAY_US(1100); //rdv delete...poll I2C regs to determine when to move forward?
// Disable/enable I2C module to change SEND/RECEIVE mode
I2caRegs.I2CMDR.bit.IRS = 0; //rdv Put I2C module in reset while making changes
I2caRegs.I2CMDR.bit.MST = 0; //rdv Set slave mode
I2caRegs.I2CMDR.bit.TRX = 0; //rdv Set receive mode
I2caRegs.I2CMDR.bit.RM = 0; //rdv Set repeat mode
I2caRegs.I2CMDR.bit.IRS = 1; //rdv I2C module is re-enabled after making changes
}
if(returnData == 0x02) // If this slave module has been queried, then respond...
{
GpioDataRegs.GPASET.bit.GPIO12 = 1; //rdv Take GPIO output high
int i;
dataCopiedFromI2CDRR = returnData = 0x99;
// Setup I2C module modes
I2caRegs.I2CMDR.bit.IRS = 0; //rdv Put I2C module in reset while making changes
I2caRegs.I2CMDR.bit.MST = 0; //rdv 0 = slave mode
I2caRegs.I2CMDR.bit.TRX = 1; //rdv 1 = transmit mode
I2caRegs.I2CMDR.bit.RM = 0; //rdv 1 = repeat mode
I2caRegs.I2CMDR.bit.IRS = 1; //rdv I2C module is re-enabled after making changes
I2caRegs.I2CDXR = sData[4]; //rdv Loads a value into the data xmit buffer, starting the xmit process
I2caRegs.I2CDXR = sData[5]; //rdv Loads a value into the data xmit buffer, starting the xmit process
I2caRegs.I2CDXR = sData[6]; //rdv Loads a value into the data xmit buffer, starting the xmit process
I2caRegs.I2CDXR = sData[7]; //rdv Loads a value into the data xmit buffer, starting the xmit process
PieCtrlRegs.PIEACK.bit.ACK8 = 1; //rdv Issue ACK
GpioDataRegs.GPACLEAR.bit.GPIO12 = 1; //rdv Take GPIO output low
DELAY_US(1100); //rdv delete...poll I2C regs to determine when to move forward?
// Disable/enable I2C module to change SEND/RECEIVE mode
I2caRegs.I2CMDR.bit.IRS = 0; //rdv Put I2C module in reset while making changes
I2caRegs.I2CMDR.bit.MST = 0; //rdv Set slave mode
I2caRegs.I2CMDR.bit.TRX = 0; //rdv Set receive mode
I2caRegs.I2CMDR.bit.RM = 0; //rdv Set repeat mode
I2caRegs.I2CMDR.bit.IRS = 1; //rdv I2C module is re-enabled after making changes
}
}
}
}
//
// I2CA_Init -
//
void
I2CA_Init(void)
{
//
// Initialize I2C
//
I2caRegs.I2CMDR.bit.IRS = 0; //rdv Put I2C module in reset while making changes
I2caRegs.I2COAR = I2C_SLAVE_ADDR; //rdv Own address = 0x28
// I2caRegs.I2CIER.all = 0x24; // Enable SCD & ARDY interrupts
I2caRegs.I2CIER.bit.AAS = 0; //rdv 1 = Addressed as slave interrupt request enabled
I2caRegs.I2CIER.bit.SCD = 1; //rdv 1 = Stop condition detected interrupt request enabled
I2caRegs.I2CIER.bit.XRDY = 0; //rdv 0 = Transmit data ready interrupt request disabled
I2caRegs.I2CIER.bit.RRDY = 0; //rdv 1 = Receive data ready interrupt request enabled
I2caRegs.I2CIER.bit.ARDY = 1; //rdv 1 = Register access ready interrupt request enabled
I2caRegs.I2CIER.bit.NACK = 0; //rdv 0 = No-ack interrupt request disabled
I2caRegs.I2CIER.bit.ARBL = 0; //rdv 0 = Arbitration lost interrupt request disabled
I2caRegs.I2CSTR.bit.SDIR = 1; //rdv Slave direction bit 0 = not addressed as slave transmitter
I2caRegs.I2CSTR.bit.NACKSNT = 1; //rdv NACK sent bit 0 = NACK not sent
//r.o. I2caRegs.I2CSTR.bit.BB = 1; //rdv Busy bit (read only) 0 = bus free
//r.o. I2caRegs.I2CSTR.bit.RSFULL = 1; //rdv 1 = receive shift register overrun condition detected
//r.o. I2caRegs.I2CSTR.bit.XSMT = 1; //rdv 0 = transmit shift register underflow detected (empty)
//r.o. I2caRegs.I2CSTR.bit.AAS = 1; //rdv 1 = I2C module recognized its own slave address
//r.o. I2caRegs.I2CSTR.bit.AD0 = 1; //rdv 1 = address of all zeros (general call) was detected
I2caRegs.I2CSTR.bit.SCD = 1; //rdv 1 = stop condition was detected
//r.o. I2caRegs.I2CSTR.bit.XRDY = 1; //rdv 1 = Ready for more transmit data to go in I2CDXR
I2caRegs.I2CSTR.bit.RRDY = 1; //rdv Receive data ready int flag 1 = data is in I2CDRR
I2caRegs.I2CSTR.bit.ARDY = 1; //rdv Register access ready int flag (master mode only)
I2caRegs.I2CSTR.bit.NACK = 1; //rdv 1 = NACK received
I2caRegs.I2CSTR.bit.ARBL = 1; //rdv 1 = arbitration lost
I2caRegs.I2CCLKL = 62; //rdv 10mHz / 100 = 100kHz
I2caRegs.I2CCLKH = 28; //rdv 28 + 5 = 33 --> 33 + 67 = 100
I2caRegs.I2CCNT = 1; //rdv Set data count (ignored in RM mode)
I2caRegs.I2CSAR = I2C_MASTER_ADDR; //rdv Address to which next data will be transmitted by this slave
I2caRegs.I2CMDR.bit.NACKMOD = 0; //rdv NACK mode
I2caRegs.I2CMDR.bit.FREE = 1; //rdv For debugging: 0 = I2C doesn't halt during interrupts
I2caRegs.I2CMDR.bit.STT = 0; //rdv Start bit
I2caRegs.I2CMDR.bit.STP = 0; //rdv Stop bit
I2caRegs.I2CMDR.bit.MST = 0; //rdv Master mode
I2caRegs.I2CMDR.bit.TRX = 0; //rdv Receive mode
I2caRegs.I2CMDR.bit.XA = 0; //rdv 0 = 7 bit address mode
I2caRegs.I2CMDR.bit.RM = 0; //rdv repeat mode
I2caRegs.I2CMDR.bit.DLB = 0; //rdv Digital loopback mode
I2caRegs.I2CMDR.bit.STB = 0; //rdv Start Byte mode (master only)
I2caRegs.I2CMDR.bit.FDF = 0; //rdv Free data format mode
I2caRegs.I2CMDR.bit.BC = 0; //rdv Set bit count to 8 bits (0 = 8)
I2caRegs.I2CEMDR.bit.BC = 1; //rdv Backwards compatibility mode
I2caRegs.I2CPSC.bit.IPSC = 9; //rdv Prescaler value 90mHz SYSCLK / 9 = 10mHz
I2caRegs.I2CFFTX.bit.I2CFFEN = 1; //rdv Enable transmit & receive FIFOs
I2caRegs.I2CFFTX.bit.TXFFRST = 1; //rdv Take transmit FIFO out of reset
//r.o. I2caRegs.I2CFFTX.bit.TXFFST = 0; //rdv How many bytes are in the transmit FIFO
//r.o. I2caRegs.I2CFFTX.bit.TXFFINT = 0; //rdv 1 = interrupt occurred
I2caRegs.I2CFFTX.bit.TXFFINTCLR = 1; //rdv Clears transmit interrupt flag (do again after irs = 1
I2caRegs.I2CFFTX.bit.TXFFIENA = 1; //rdv Disable transmit FIFO interrupt
I2caRegs.I2CFFTX.bit.TXFFIL = 1; //rdv Set the transmit FIFO interrupt level
I2caRegs.I2CFFRX.bit.RXFFRST = 1; //rdv 1 = enable receive FIFO operation
//r.o. I2caRegs.I2CFFRX.bit.RXFFST = 0; //rdv Bytes in receive FIFO
I2caRegs.I2CFFRX.bit.RXFFINT = 0; //rdv Receive interrupt flag 1 = int
I2caRegs.I2CFFRX.bit.RXFFINTCLR = 1; //rdv Write 1 to clear receive int flag
I2caRegs.I2CFFRX.bit.RXFFIENA = 1; //rdv 1 = receive interrupt is enabled
I2caRegs.I2CFFRX.bit.RXFFIL = 1; //rdv Set the receive FIFO interrupt level
I2caRegs.I2CMDR.bit.IRS = 1; //rdv I2C module is re-enabled after making changes
I2caRegs.I2CFFTX.bit.TXFFINTCLR = 1; //rdv Clears transmit interrupt flag
I2caRegs.I2CFFRX.bit.RXFFINTCLR = 1; //rdv Clears receive interrupt flag
return;
}
//
// I2CA_WriteData -
//
Uint16
I2CA_WriteData(struct I2CMSG *msg)
{
Uint16 i;
//
// Wait until the STP bit is cleared from any previous master communication.
// Clearing of this bit by the module is delayed until after the SCD bit is
// set. If this bit is not checked prior to initiating a new message, the
// I2C could get confused.
//
if (I2caRegs.I2CMDR.bit.STP == 1)
{
return I2C_STP_NOT_READY_ERROR;
}
//
// Setup slave address
//
I2caRegs.I2CSAR = msg->SlaveAddress;
//
// Check if bus busy
//
if (I2caRegs.I2CSTR.bit.BB == 1)
{
return I2C_BUS_BUSY_ERROR;
}
//
// Setup number of bytes to send MsgBuffer + Address
//
I2caRegs.I2CCNT = msg->NumOfBytes;//+2;
//
// Setup data to send
//
// I2caRegs.I2CDXR = msg->MemoryHighAddr;
// I2caRegs.I2CDXR = msg->MemoryLowAddr;
//
// Send start as master transmitter
//
I2caRegs.I2CMDR.all = 0x2E20;
// for (i=0; i<msg->NumOfBytes-2; i++)
for (i=0; i < msg->NumOfBytes; i++)
{
// I2caRegs.I2CDXR = *(msg->MsgBuffer+i);
}
//
// Send stop
//
I2caRegs.I2CMDR.bit.STP = 1;
I2cMsgOut.MsgStatus = I2C_MSGSTAT_INACTIVE;
return I2C_SUCCESS;
}
//
// I2CA_ReadData -
//
Uint16
I2CA_ReadData(struct I2CMSG *msg)
{
//
// Wait until the STP bit is cleared from any previous master communication.
// Clearing of this bit by the module is delayed until after the SCD bit is
// set. If this bit is not checked prior to initiating a new message, the
// I2C could get confused.
//
if (I2caRegs.I2CMDR.bit.STP == 1)
{
return I2C_STP_NOT_READY_ERROR;
}
I2caRegs.I2CSAR = msg->SlaveAddress;
if(msg->MsgStatus == I2C_MSGSTAT_SEND_NOSTOP)
{
//
// Check if bus busy
//
if (I2caRegs.I2CSTR.bit.BB == 1)
{
return I2C_BUS_BUSY_ERROR;
}
I2caRegs.I2CMDR.bit.RM = 1;
I2caRegs.I2CCNT = 0;
// I2caRegs.I2CDXR = msg->MemoryHighAddr;
// I2caRegs.I2CDXR = msg->MemoryLowAddr;
//
// Send data to setup EEPROM address
//
I2caRegs.I2CMDR.all = 0x2620;
}
else if(msg->MsgStatus == I2C_MSGSTAT_RESTART)
{
I2caRegs.I2CCNT = msg->NumOfBytes; // Setup how many bytes to expect
I2caRegs.I2CMDR.all = 0x2C20; // Send restart as master receiver
}
return I2C_SUCCESS;
}
//
// i2c_int1a_isr - I2C-A
//
__interrupt void
i2c_int1a_isr(void)
{
unsigned int i;
//
// If receive FIFO interrupt flag is set, read data
//
if(I2caRegs.I2CFFRX.bit.RXFFINT)
{
qtyOfReceiveInterrupts++;
dataCopiedFromI2CDRR = I2caRegs.I2CDRR;
captureBufferIndex &= 0x1f;
captureBuffer[captureBufferIndex++] = dataCopiedFromI2CDRR;
// Clear interrupt flag
I2caRegs.I2CMDR.bit.IRS = 0; //rdv Put I2C module in reset while making changes
I2caRegs.I2CFFRX.bit.RXFFINTCLR = 1; //rdv Clears receive interrupt flag
I2caRegs.I2CMDR.bit.IRS = 1; //rdv I2C module is re-enabled after making changes
}
// If transmit FIFO interrupt flag is set, put data in the buffer
else if(I2caRegs.I2CFFTX.bit.TXFFINT)
{
//This interrupt is not enabled
I2caRegs.I2CFFTX.bit.TXFFINTCLR = 1; //rdv Clears transmit interrupt flag
}
//
// Issue ACK
//
//delete Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP8);
// PieCtrlRegs.PIEACK.all = PIEACK_GROUP8;
PieCtrlRegs.PIEACK.bit.ACK8 = 1; //rdv Issue ACK
}
Questions:
Thank you in advance,
robin






