- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

To control a motor we use the TMS320F28069M as co-controller. We want to control the revolution speed. As base for our project we used Lab5b of motorware 1.01.00.18 which we upgraded to control two motors. The reson for that is we want to have to oportunity to re-identify motor parameters and change those parameters on-the-fly without reflashing the TMS320.
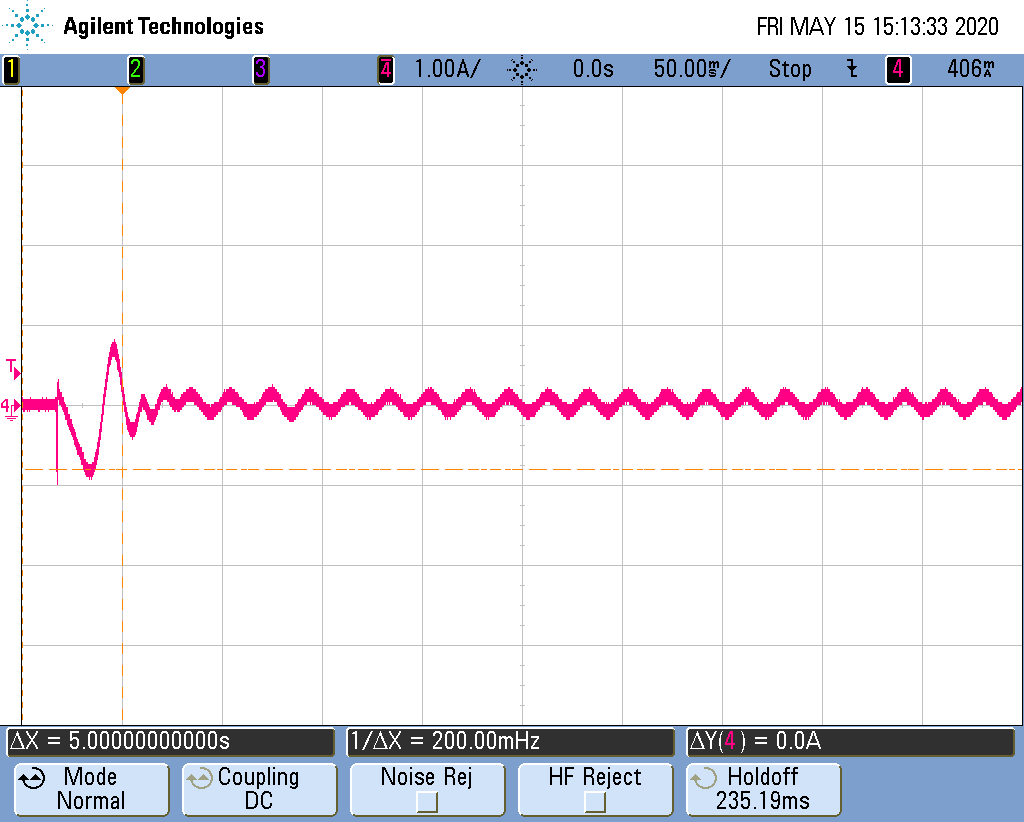
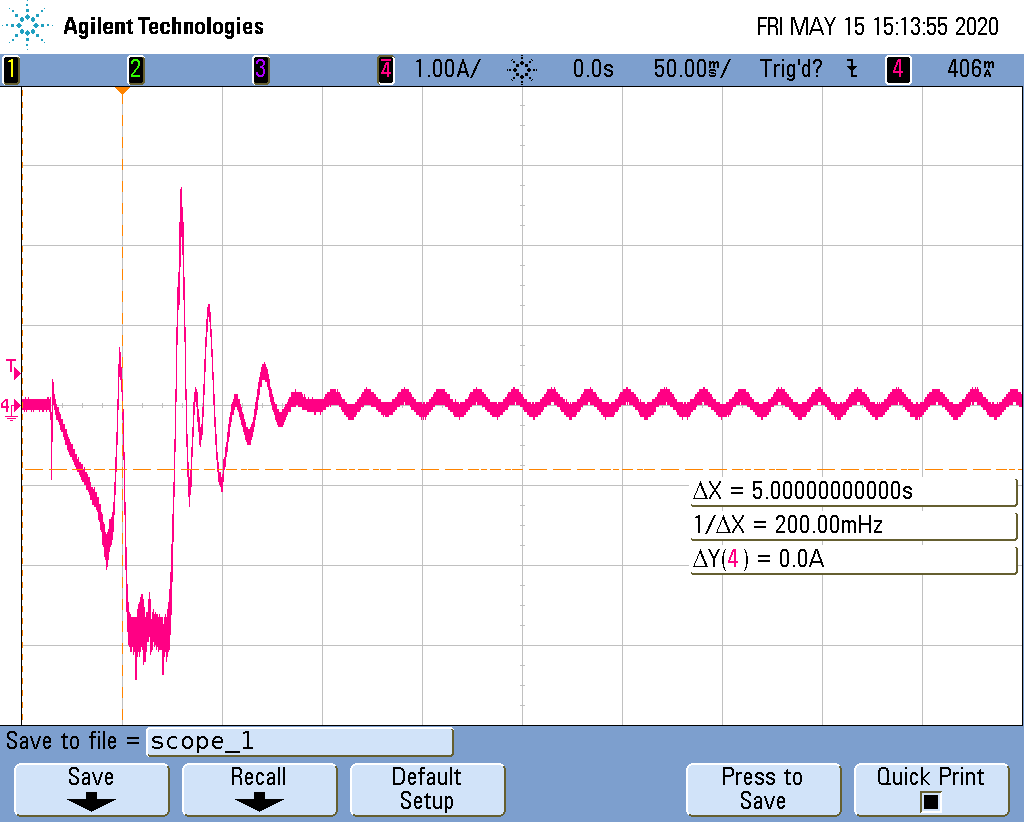
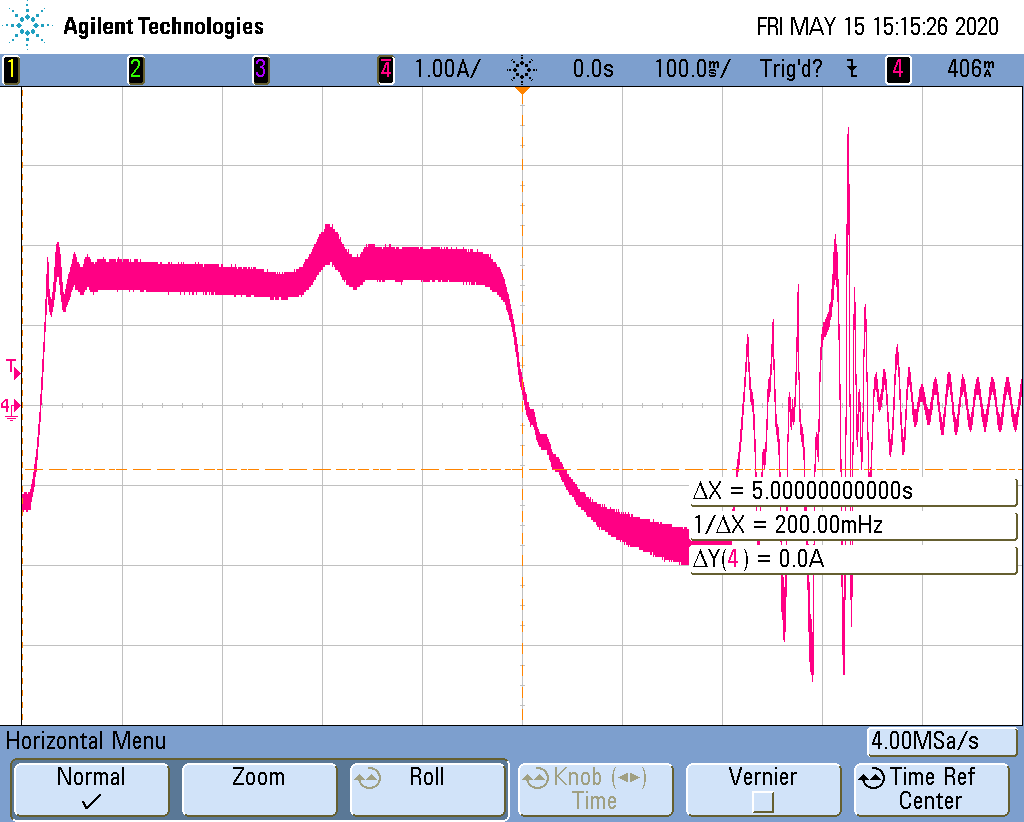
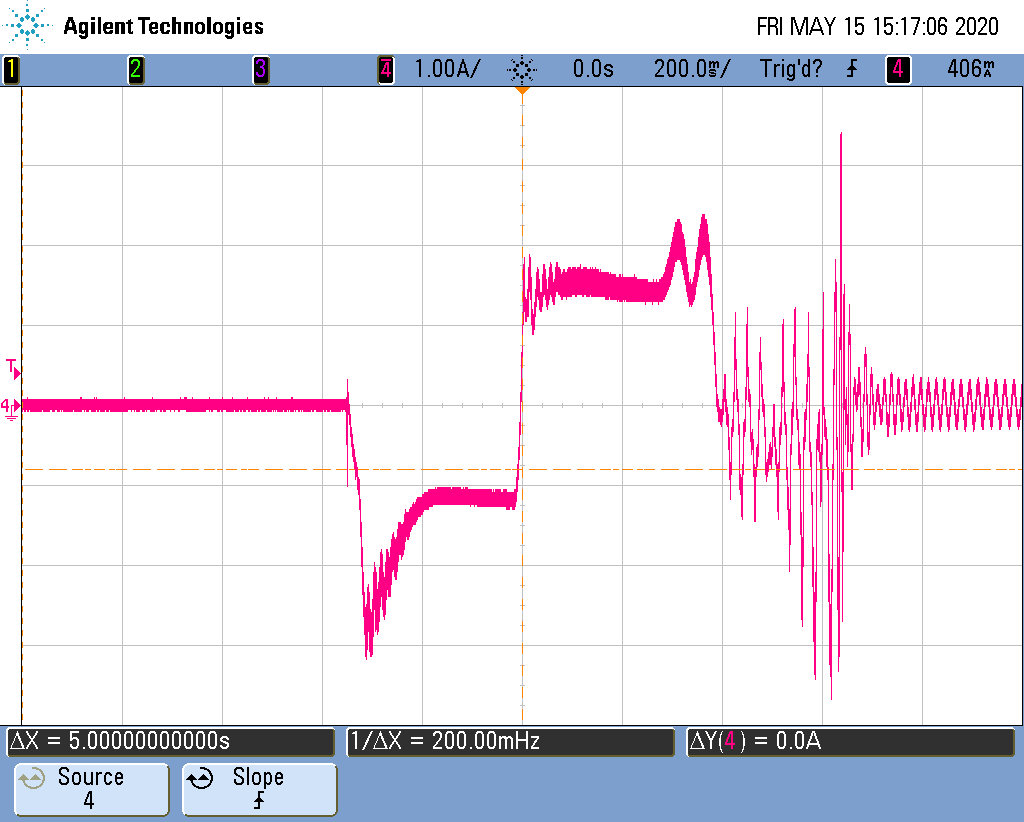
We have now following problem: it happens that an identified motor does not start properly if the rotor is in a certain position. So far we found out it got better if we increase the accelleration but unfortuantely it still happens. Changing directions while the motor is running works as expected. Which paramters have influence on the start of the motor?