Tool/software: Code Composer Studio
Hello Everyone,
I am trying to generate synchronization pulses for LLC converter.
I measure the AC current from the secondary and using opamp, 0 to 5V pulses are generated at every 0 crossing of the AC current. I am successfully getting these pulses and I measure the frequency of this pulse using ecap4 module.
With this measured frequency I am generating EPWM signals for my MOSFETs, and I do generate the right frequency pulses.
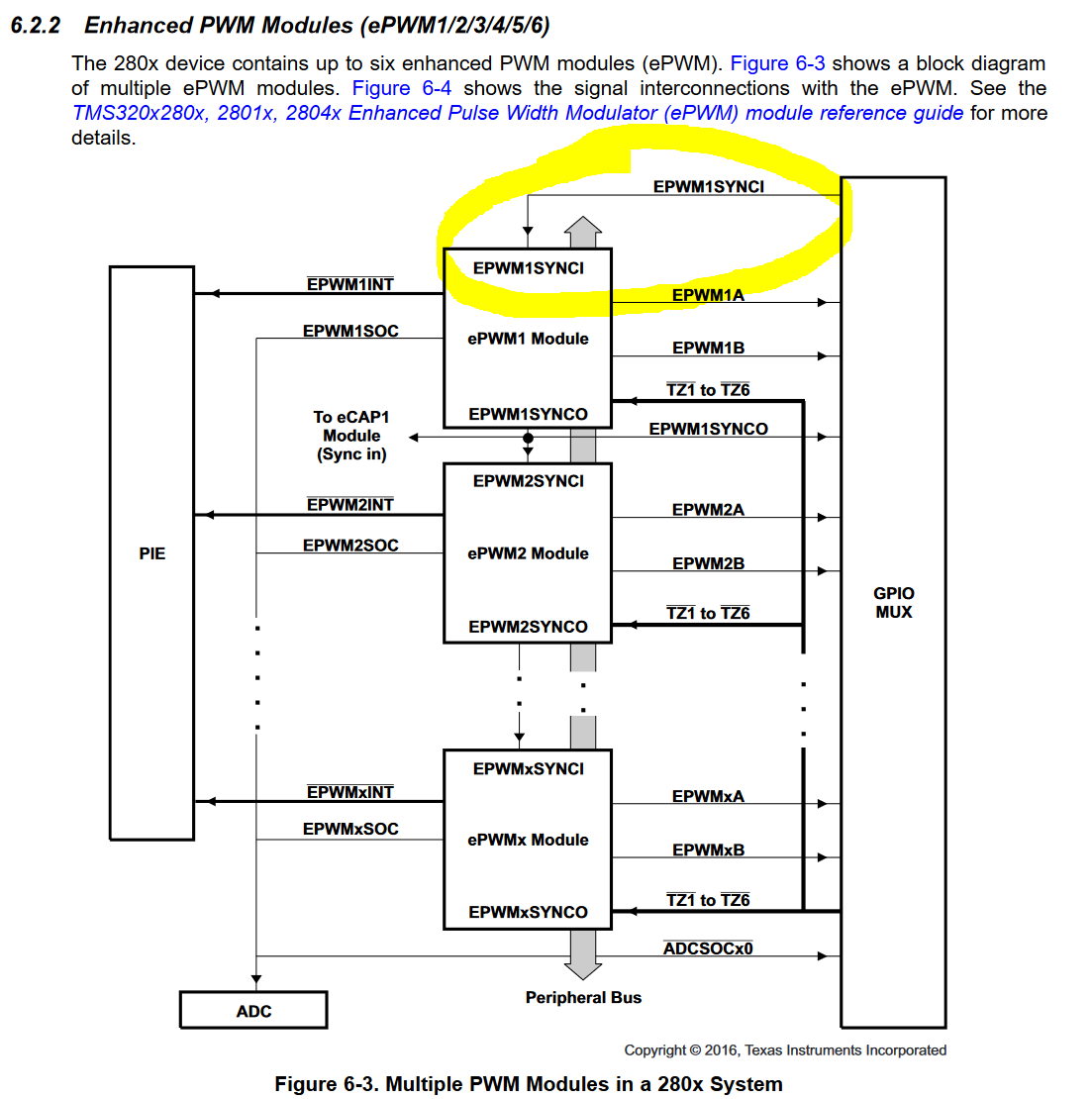
however I am not able to synchronize the ecap4 module with epwm 1 module? Is this possible? If yes, which statement can I use?
Eagerly waiting for an answer.