- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Tool/software: Code Composer Studio
NOTE: The project run in CM core.
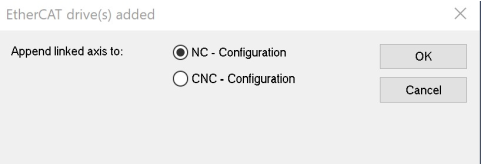
When i scan my borad by TwinCAT3,have no "EtherCAT device(s) added" windown appear,and no MOTION model generate.