Part Number: TMS320F28379D
Other Parts Discussed in Thread: LAUNCHXL-F28379D, C2000WARE,
Hi community!
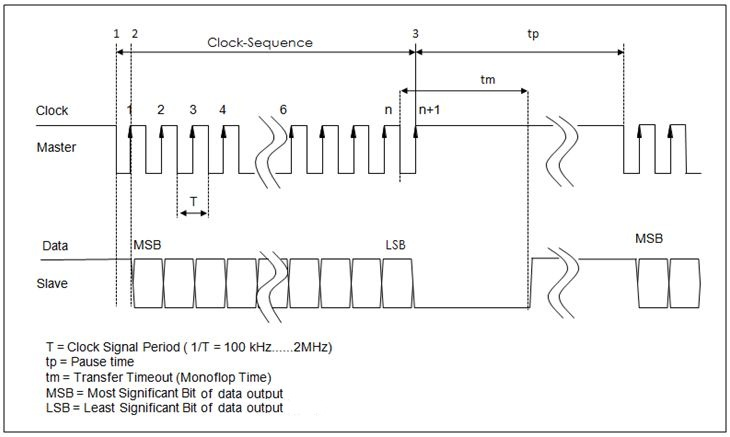
I am using a LAUNCHXL-F28379D for the communication with a SSI absolute encoder. According to the datasheet of the encoder, I need a constant time delay (tm) between the clock cycles. Besides, the number of bits that should be received in each cycle is 13.
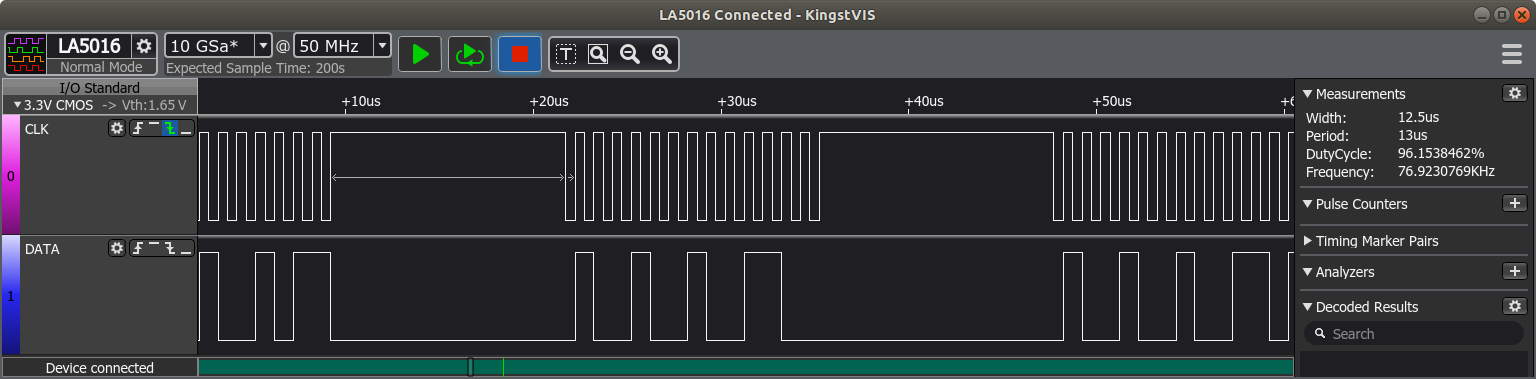
For generating the mentioned delay, I have configured the SPI module in FIFO mode. I tied to provide the delay by using SPIFFCT. However, based on the delay of the code execration, the delay varies! here you can find my code:
for(;;)
{
sdata = 56;
sdata = sdata*8;
// Transmit data
spi_xmit(sdata);
// Wait until data is received
while(SpiaRegs.SPIFFRX.bit.RXFFST !=1) { }
// Check against sent data
delay_loop();
rdata = SpiaRegs.SPIRXBUF;
// if(rdata != sdata) error();
}
It sends a number (e.g. 56) and recives it back in "rdata". However, changing the "delay_loop()" length, changes the delay that has been set by SPIFFCT. Here are my configurations:
void spi_init()
{
SpiaRegs.SPICCR.all =0x004C; // Reset on, rising edge, 16-bit char bits
SpiaRegs.SPICTL.all =0x0006; // Enable master mode, normal phase,
// enable talk, and SPI int disabled.
SpiaRegs.SPIBRR.all =0x0031;
SpiaRegs.SPICCR.all =0x00DC; // Relinquish SPI from Reset
SpiaRegs.SPIPRI.bit.FREE = 1; // Set so breakpoints don't disturb xmission
}
void spi_xmit(Uint16 a)
{
SpiaRegs.SPITXBUF=a;
}
void spi_fifo_init()
{
// Initialize SPI FIFO registers
SpiaRegs.SPIFFTX.all=0xE040;
SpiaRegs.SPIFFRX.all=0x205F;
SpiaRegs.SPIFFCT.all=0x7;
}
Would anyone please help me? Is there any better way for providing the constant delay as written in the datasheet? (about 12 us).
Regards.