Other Parts Discussed in Thread: CONTROLSUITE, BOOSTXL-DRV8320RS, , DRV8320, UCC27714, MOTORWARE, INA240
DC inverter connected to launchXL Booster pack headers J5-J8 via short jumper wires. ADC voltage feed back A,B,C phases consist 3 x 6" twisted pairs, ground common to both boards.
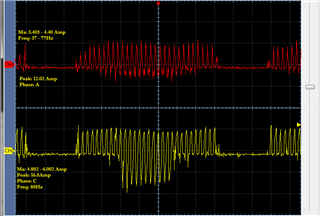
Does SDK v2.01 Lab05 and Lab07 have constraints to control speed trajectory overshoot for >1Kg rotor? Setting target >10Hz motor stalls on startup no matter acceleration adjusted any <10Hz/sec. Then the trajectory can only be increased 10Hz increments <60Hz or trajectory engine overshoots target and cause CMPPx trip >18.5A. Typical 20Hz trajectory target speed pulls down +24v BUS and stalls motor, cogs rotor in one to several pole places. Small Nidec series 25 motor <0.05 kg rotor mass has no trajectory speed issues quickly reaches >200Hz via 24VDC supply.
A large part of issue hours trying to determine reason for cogging was linked to J7 pins 64,65 (voltage feedback) being reversed, perhaps on J7 header launchXL?
Oddly >2Kg rotor mass tops 300 RPM +24vdc (trapezoidal FOC via PI speed control) and only 168 RPM via FAST, refuses >60Hz unless 40vdc supply, feedback resistor divider has 57.42vdc MAX.
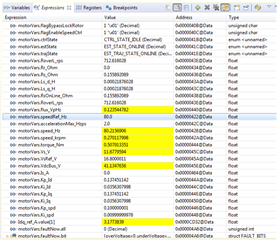
Should the USER_ADC_NOMINAL_BUS_VOLTAGE be set for actual DC supply Peak (user.h) only? Is voltage feedback divider used for USER_ADC_FULL_SCALE_VOLTAGE_V only? Simpy put is Nominal Bus Voltage an independent stand alone parameter? Obviously parameter helps to determine sector middle point but is it directly part of or tied to ADC full scale voltage as described (5.2.3 SPRUHJ1H–January 2013–Revised June 2019)?
To sum it up, can the nominal DC bus voltage be made 50% less than feed back resistor dividers without effecting the trajectory engine or speed controller actions?