Other Parts Discussed in Thread: MSP430G2553, SYSBIOS
Dear all,
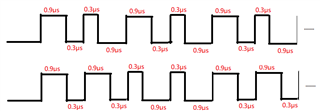
I want to each 0.3µs to change GPIO high or low.
So how to create a timer on RTOS and period about 0.3µs?
Thanks.
Dear all,
I want to each 0.3µs to change GPIO high or low.
So how to create a timer on RTOS and period about 0.3µs?
Thanks.
**Attention** This is a public forum