Other Parts Discussed in Thread: MSP430F2012
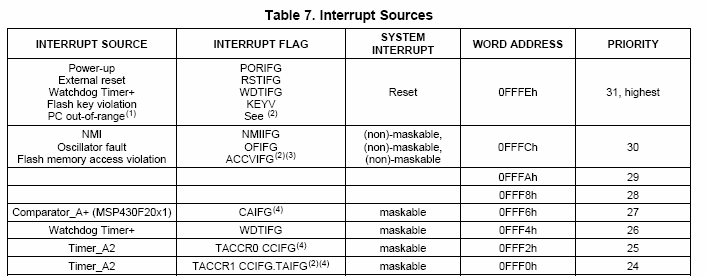
I'm using the MSP430F2012 and am still sorting out the details of clocks, timers and interrupts. I went over the Timer_A code examples and couldn't help noticing there are no examples that give the vector ID for CCR0. There is only one example in which CCR0 and CCR1 are used together, and in it separate interrupt handling routines are used. Is that by necessity? Since TAIV for CCR1=2, and CCR2=4, I'd guess CCR0=0 ...
Thanks.