Other Parts Discussed in Thread: USB2ANY
Hi team,
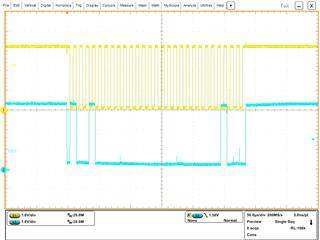
I use I2C communication to communicate MSP430FR2355 as slaver with PC as master.
Using the sample program in resource explorer for I2C communication, msp430fr235x_eusci_i2c_standard_slave.c, when I using USB2ANY to communicate PC with MSP430 to write and read data (P1.2/P1.3, Slave address 0x48). It always shows "write timeout". Pullup 4.7kohm resistors for SDA and SCL are also added already.
Thanks for your help in advance.