- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
BSL Scripter Version: 3.2.1
Compiler Version: TI 21.6.1.LTS
CCS Version: 12.4.0
UART BSL: MSP430F5529
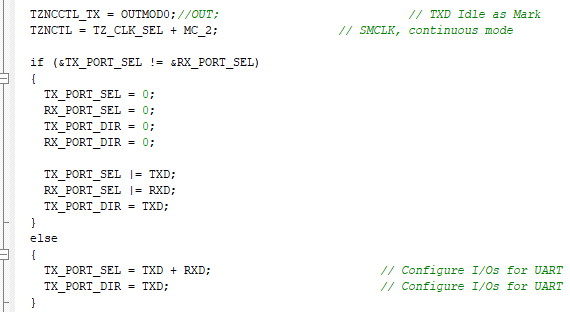
UART Pins: RX: 8.2 and TX: 8.3
Physical Bus: RS-485
I am trying to send the Mass_Erase Command from the BSL Scripter like this: 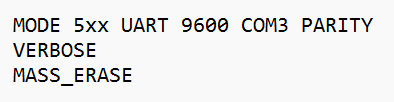
Although I got correct commands from the UART(CRC is correct). But I don't get the successful response from the BSL. I tried to debug the code and I found out that my controller get's in the infinite loop after executing the BSL430_massErase() function. After that all the commands get's rejected and fails.
Programs leads to this function: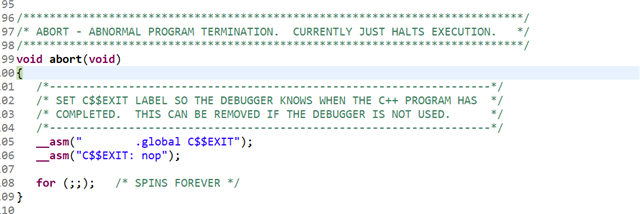 .
.

**Attention** This is a public forum



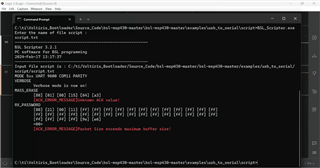
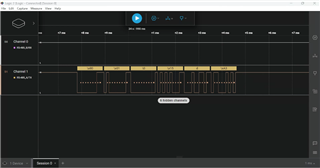 , Please find the captured TX/RX values below, as the controller gets in the reset mode and does not reply:
, Please find the captured TX/RX values below, as the controller gets in the reset mode and does not reply: