


Other Parts Discussed in Thread: DLPC3478
Hello, Engineer:
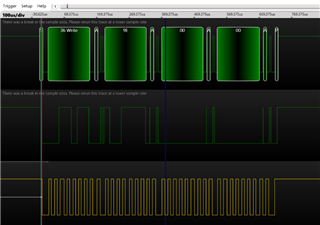
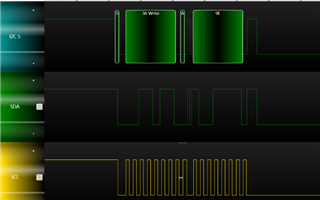
I use MSP430G2553IPW20. Connect its P1.6 and P1.7 to DLPC 3478, the IO is configured to simulate I2C, and the instruction sent is 36 9E 00 00. The test shows that there will be packet loss, which will happen once every dozens to hundreds of times.
The following figure shows the time sequence during normal communication:
The following figure shows the sequence of missing pictures:
In the past, P1.4 and P1.5io were used to simulate I2C. After many tests, there was no packet loss problem. Because the circuit design has been changed recently, the IO has been changed, and the code just exchanged IO configuration, so this problem was found.
Can you help me analyze what went wrong?
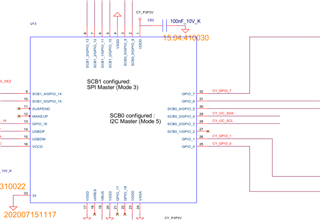
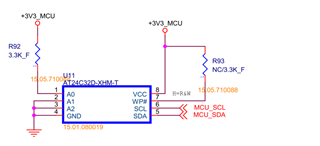
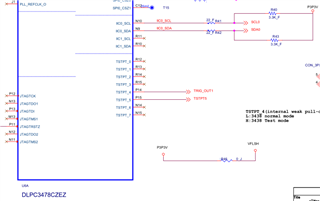
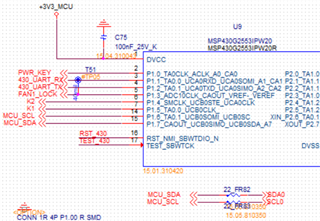
I2C related hardware is as follows:
I2C related codes are as follows:
/*****************************************************************************
**
** TEXAS INSTRUMENTS PROPRIETARY INFORMATION
**
** (c) Copyright, Texas Instruments Incorporated, 2009
** All Rights Reserved.
**
** Property of Texas Instruments Incorporated. Restricted Rights -
** Use, duplication, or disclosure is subject to restrictions set
** forth in TI's program license agreement and associated documentation.
******************************************************************************/
/*************************************************************
* THIS PROGRAM IS PROVIDED "AS IS." TI MAKES NO WARRANTIES OR
* REPRESENTATIONS, EITHER EXPRESS, IMPLIED OR STATUTORY,
* INCLUDING ANY IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE, LACK OF VIRUSES, ACCURACY OR
* COMPLETENESS OF RESPONSES, RESULTS AND LACK OF NEGLIGENCE.
* TI DISCLAIMS ANY WARRANTY OF TITLE, QUIET ENJOYMENT, QUIET
* POSSESSION, AND NON-INFRINGEMENT OF ANY THIRD PARTY
* INTELLECTUAL PROPERTY RIGHTS WITH REGARD TO THE PROGRAM OR
* YOUR USE OF THE PROGRAM.
*
* IN NO EVENT SHALL TI BE LIABLE FOR ANY SPECIAL, INCIDENTAL,
* CONSEQUENTIAL OR INDIRECT DAMAGES, HOWEVER CAUSED, ON ANY
* THEORY OF LIABILITY AND WHETHER OR NOT TI HAS BEEN ADVISED
* OF THE POSSIBILITY OF SUCH DAMAGES, ARISING IN ANY WAY OUT
* OF THIS AGREEMENT, THE PROGRAM, OR YOUR USE OF THE PROGRAM.
* EXCLUDED DAMAGES INCLUDE, BUT ARE NOT LIMITED TO, COST OF
* REMOVAL OR REINSTALLATION, COMPUTER TIME, LABOR COSTS, LOSS
* OF GOODWILL, LOSS OF PROFITS, LOSS OF SAVINGS, OR LOSS OF
* USE OR INTERRUPTION OF BUSINESS. IN NO EVENT WILL TI'S
* AGGREGATE LIABILITY UNDER THIS AGREEMENT OR ARISING OUT OF
* YOUR USE OF THE PROGRAM EXCEED FIVE HUNDRED DOLLARS
* (U.S.$500).
*
* Unless otherwise stated, the Program is written and copyrighted
* by Texas Instruments is distributed as "freeware." You may,
* only under TI's copyright in the Program, use and modify the
* Program without any charge or restriction. You may
* distribute to third parties, provided that you transfer a
* copy of this license to the third party and the third party
* agrees to these terms by its first use of the Program. In
* jurisdictions in which use is not deemed acceptance of these
* terms, no license is granted and no use is permitted. You
* must reproduce the copyright notice and any other legend of
* ownership on each copy or partial copy of the Program.
*
* You acknowledge and agree that the Program contains
* copyrighted material, trade secrets and other TI proprietary
* information and is protected by copyright laws,
* international copyright treaties, and trade secret laws, as
* well as other intellectual property laws. You agree that in
* no event will you alter, remove or destroy any copyright
* notice included in the Program. TI reserves all rights not
* specifically granted under this license. Except as
* specifically provided herein, nothing in this agreement
* shall be construed as conferring upon you, by implication,
* estoppel, or otherwise, any license or other right under any
* TI patents, copyrights or trade secrets.
*************************************************************/
#ifndef __i2c_master
#define __i2c_master
#ifdef __cplusplus
extern "C" {
#endif
// defines
#define I2C_NO_ACK 0
//***********functions 软件i2C**********************************/
uint08 I2C_PolledMasterWrite(uint08 device_addr, uint08* write_data, uint08 num_bytes);
uint08 I2C_PolledMasterRead(uint08 device_addr, uint08* read_data, uint08 num_bytes);
void I2C_Master_Init (void);
void I2C_Master_Start(void);
uint08 I2C_Master_Stop(void);
uint08 I2C_MasterTransmitByte(uint08 data);
uint08 I2C_MasterReceiveByte(void);
//***********functions 软件i2C**********************************/
/*
void i2c_hw_init(void);//不支持P14&P15
void set_devaddr(uint08 dev_addr);
int i2c_hw_write(uint08 dev_addr, int32 inlen, unsigned char *pdata);
int i2c_hw_read(uint08 dev_addr, int32 inlen, unsigned char *pdata);
int i2c_dpp_write(uint08 dev_addr, unsigned char cmd , int outlen, unsigned char *pdata);
int i2c_dpp_read(uint08 dev_addr, unsigned char cmd , int inlen, unsigned char *pdata);
int i2c_sil9293_write(uint08 dev_addr, unsigned char cmd , int outlen, unsigned char *pdata);
int i2c_sil9293_read(uint08 dev_addr, unsigned char cmd , int inlen, unsigned char *pdata);
*/
#ifdef __cplusplus /* matches __cplusplus construct above */
}
#endif
#endif // #ifndef __i2c_master
/*****************************************************************************
**
** TEXAS INSTRUMENTS PROPRIETARY INFORMATION
**
** (c) Copyright, Texas Instruments Incorporated, 2009
** All Rights Reserved.
**
** Property of Texas Instruments Incorporated. Restricted Rights -
** Use, duplication, or disclosure is subject to restrictions set
** forth in TI's program license agreement and associated documentation.
******************************************************************************/
/*************************************************************
* THIS PROGRAM IS PROVIDED "AS IS." TI MAKES NO WARRANTIES OR
* REPRESENTATIONS, EITHER EXPRESS, IMPLIED OR STATUTORY,
* INCLUDING ANY IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE, LACK OF VIRUSES, ACCURACY OR
* COMPLETENESS OF RESPONSES, RESULTS AND LACK OF NEGLIGENCE.
* TI DISCLAIMS ANY WARRANTY OF TITLE, QUIET ENJOYMENT, QUIET
* POSSESSION, AND NON-INFRINGEMENT OF ANY THIRD PARTY
* INTELLECTUAL PROPERTY RIGHTS WITH REGARD TO THE PROGRAM OR
* YOUR USE OF THE PROGRAM.
*
* IN NO EVENT SHALL TI BE LIABLE FOR ANY SPECIAL, INCIDENTAL,
* CONSEQUENTIAL OR INDIRECT DAMAGES, HOWEVER CAUSED, ON ANY
* THEORY OF LIABILITY AND WHETHER OR NOT TI HAS BEEN ADVISED
* OF THE POSSIBILITY OF SUCH DAMAGES, ARISING IN ANY WAY OUT
* OF THIS AGREEMENT, THE PROGRAM, OR YOUR USE OF THE PROGRAM.
* EXCLUDED DAMAGES INCLUDE, BUT ARE NOT LIMITED TO, COST OF
* REMOVAL OR REINSTALLATION, COMPUTER TIME, LABOR COSTS, LOSS
* OF GOODWILL, LOSS OF PROFITS, LOSS OF SAVINGS, OR LOSS OF
* USE OR INTERRUPTION OF BUSINESS. IN NO EVENT WILL TI'S
* AGGREGATE LIABILITY UNDER THIS AGREEMENT OR ARISING OUT OF
* YOUR USE OF THE PROGRAM EXCEED FIVE HUNDRED DOLLARS
* (U.S.$500).
*
* Unless otherwise stated, the Program is written and copyrighted
* by Texas Instruments is distributed as "freeware." You may,
* only under TI's copyright in the Program, use and modify the
* Program without any charge or restriction. You may
* distribute to third parties, provided that you transfer a
* copy of this license to the third party and the third party
* agrees to these terms by its first use of the Program. In
* jurisdictions in which use is not deemed acceptance of these
* terms, no license is granted and no use is permitted. You
* must reproduce the copyright notice and any other legend of
* ownership on each copy or partial copy of the Program.
*
* You acknowledge and agree that the Program contains
* copyrighted material, trade secrets and other TI proprietary
* information and is protected by copyright laws,
* international copyright treaties, and trade secret laws, as
* well as other intellectual property laws. You agree that in
* no event will you alter, remove or destroy any copyright
* notice included in the Program. TI reserves all rights not
* specifically granted under this license. Except as
* specifically provided herein, nothing in this agreement
* shall be construed as conferring upon you, by implication,
* estoppel, or otherwise, any license or other right under any
* TI patents, copyrights or trade secrets.
*************************************************************/
#include "common.h"
#include "i2c_master.h"
//#include "msp430f2132.h"
#include "msp430G2553.h"
#include "HWGPIO.h"
#include "delay.h"
#define SDA_HI I2C_SetSDA_High()
#define SDA_LO I2C_SetSDA_Low()
#define SDA_IN I2C_GetSDA_Input()
#define SCL_HI I2C_SetSCL_High()
#define SCL_LO I2C_SetSCL_Low()
#define SCL_IN I2C_GetSCL_Input()
void I2C_SetSDA_High (void);
void I2C_SetSDA_Low (void);
BOOL I2C_GetSDA_Input (void);
void I2C_SetSCL_High (void);
void I2C_SetSCL_Low (void);
BOOL I2C_GetSCL_Input (void);
// local functions
//uint08 i2c_master_check_nak_timeout(uint08 timeout, uint08 check_nak);
//void i2c_master_cleanup(void);
void i2c_delay_us(int n)
{
int i;
for(i = 0; i < n; i++)
{
// __no_operation();
// __no_operation();//ALL=15
__no_operation();
__no_operation();
__no_operation();
__no_operation();
__no_operation();
__no_operation();
__no_operation();
__no_operation();
__no_operation();
__no_operation();
__no_operation();
__no_operation();
__no_operation();
__no_operation();
// __no_operation();
// __no_operation();//ALL=15
}
}
////////////////////////////////////////////////////////////////////////
void I2C_Master_Start(void) // Set up start condition for I2C
/**
* Generates the start condition for I2C read/write
*
*/
{
volatile uint08 i;
SDA_HI;
__no_operation();
SCL_HI;
for (i=0; i<5; i++)
{
__no_operation();
SDA_LO;
__no_operation();
__no_operation();
SCL_LO;
//after end of start condition both SDA and SCL will be low
}
}
////////////////////////////////////////////////////////////////////////
uint08 I2C_Master_Stop(void) // Set up stop condition for I2C
/**
* Generates the stop condition for I2C read/write
*
*/
{
/*
volatile uint08 i; unsigned short delay=2000;
SCL_HI;
SCL_LO;
i2c_delay_us(5);
SDA_HI;
SDA_LO;
i2c_delay_us(10);
SCL_IN;
while(delay--)
{
i2c_delay_us(50);
if(~SCL_IN)
{
SCL_HI;
//SCL_OUT;
i2c_delay_us(10);
SDA_HI;
i2c_delay_us(40);
SCL_IN;
return ENABLE;
}
}
SDA_IN;
*/
{
volatile uint08 i;
SDA_LO;
i2c_delay_us(5);
SCL_HI;
i2c_delay_us(5);
SDA_HI;
i2c_delay_us(5);
i=0;
//ensure bus is in default condition ( freed by slave)
while(!SDA_IN) // i is just a variable to control the while loop run time.
{
SCL_HI;
i2c_delay_us(5);
SCL_LO;
i2c_delay_us(5);
i++;
if( i > 25)
{
break;
}
}
SCL_HI;
//After generating stop condition SCL and SDA are both high. Default condition for I2C bus.
}
return DISABLE;
}
////////////////////////////////////////////////////////////////////////
uint08 I2C_PolledMasterWrite(uint08 device_addr, uint08* write_data, uint08 num_bytes)//return 1 IIC_FAULT
/**
* Writes data to the specified device address
*
* @param device_addr - I - 7 Bit device Address
* @param write_data - I - Pointer to data buffer to be written to slave
* @param num_bytes - I - Number of bytes to be written
* @return PASS - Completed successfully
* I2C_NO_ACK - Slave NAck'ed
*
*/
{
uint08 ByteCount;
uint08 *data_ptr;
uint08 status=PASS;
// initialize pointer to the data and start the transfer
data_ptr = write_data;
// Generate START condition //
// Data line loow when clock is high //
I2C_Master_Start();
// Before writing address ensure the bit 0 is set to zero
// Bit 0 =0 means master is writing , Bit 0 =1 means master wants to read
// BIT0 = 0x1
if (I2C_MasterTransmitByte(device_addr & ~0x1) == I2C_NO_ACK)
{
// If not Acknowledged by slave//
status = I2C_NO_ACK;
}
else
// Tranmit all the data bytes as slave has acknowledged//
{
for (ByteCount=0; ByteCount<num_bytes; ByteCount++)
{
if (I2C_MasterTransmitByte(*data_ptr)== I2C_NO_ACK)
{
// If not Acknowledged by slave//
status = I2C_NO_ACK;
break;
}
else
data_ptr++;
//delay_ms(20);//YZP I2Cdelay
}
}
// Generate STOP Condition
// Data line high, when clock is high
I2C_Master_Stop();
return status;
}
////////////////////////////////////////////////////////////////////////
uint08 I2C_PolledMasterRead(uint08 device_addr, uint08* read_data, uint08 num_bytes)
/**
* Reads data from the specified device address
*
* @param device_addr - I - 7 Bit device Address
* @param read_data - I - Pointer to buffer to hold received data from slave
* @param num_bytes - I - Number of bytes to be read
* @return PASS - Completed successfully
* I2C_NO_ACK - Slave NAck'ed
*
*/
{
uint08* data_ptr;
uint08 status=PASS;
uint08 ByteCount;
data_ptr = read_data;
// Generate START condition //
// Data line low when clock is high //
I2C_Master_Start();
// Transmit the slave address //
// Before writing address ensure the bit 0 is set to 1
// Bit 0 =0 means master is writing , Bit 0 =1 means master is reading
// BIT0 = 0x1
if(I2C_MasterTransmitByte(device_addr | 0x1) == I2C_NO_ACK)
{
// If not Acknowledged //
status = I2C_NO_ACK;
}
else
{
// Receive all the data bytes //
for(ByteCount = 0; ByteCount < num_bytes; ByteCount++)
{
*data_ptr = I2C_MasterReceiveByte();
data_ptr++;
}
}
// Generate STOP Condition
// Data line high, when clock is high
I2C_Master_Stop();
return status;
}
////////////////////////////////////////////////////////////////////////
uint08 I2C_MasterTransmitByte(uint08 data)
/**
* This routine transmits one byte of data over the given clock and data lines and
* receives the ack from slave.
*
* @param data - I - The 8 bit data to be transmitted
* @return I2C_NO_ACK - Not Acknowledgeed
* PASS - Acknowledged
*
*/
{
uint08 Ack=1;
uint08 i;
uint08 Byte = data;
// printf("_I2C_MasterTransmitByte_=0x%x\n", Byte);
// Send Byte It is assumed that the start condition would have made SCL and SDA low.
// SDA should change only when SCA is low.
SCL_LO;
for(i = 0; i < 8 ; i++)
{
if( Byte & 0x80)
SDA_HI;
else
SDA_LO;
__no_operation();
__no_operation();
i2c_delay_us(2);
SCL_HI;
Byte <<= 1;
__no_operation(); //need to optimize the delay.
__no_operation();
__no_operation();
__no_operation();
i2c_delay_us(5);
SCL_LO;
//leave SDA at the end
if(i == 7)
{
SDA_HI;
}
__no_operation();
__no_operation();
i2c_delay_us(2);
}
//Receive Ack
__no_operation();
__no_operation();
i2c_delay_us(2);
SCL_HI;
//__no_operation(); // delay added bcoz without this delay ack was received wrong.
//__no_operation(); // need to optimize the delay.
i2c_delay_us(2);
// If data line is pulled low by slave- it is acknowledged
if (SDA_IN)
Ack = 0; //ack not received
else
Ack = 1; //ack received
i2c_delay_us(3);
SCL_LO;
__no_operation();
__no_operation();
i2c_delay_us(4);
SDA_LO;
if (Ack == 0) printf("__W_I2C_FAULT___\n");
//After transmitting one byte of data SCL and SDA are both low.
return Ack;
}
////////////////////////////////////////////////////////////////////////
uint08 I2C_MasterReceiveByte()
/**
* This routine receives one byte of data over the given clock and data lines and
* sends the ack to slave.
*
* @return one byte of data received from slave.
*
*/
{
uint08 Data=0;
uint08 i;
//Make SDA as input
SDA_HI;
__no_operation();
__no_operation();
i2c_delay_us(2);
for(i = 0; i < 8 ; i ++)
{
SCL_HI;
__no_operation();
__no_operation();
i2c_delay_us(2);
Data <<= 1;
if (SDA_IN)
Data |=1;
else
Data |=0;
i2c_delay_us(2);
SCL_LO;
__no_operation();
__no_operation();
i2c_delay_us(5);
}
//After the eight bits are transferred by slave, slave will pull SDA high ( default condition for I2C bus)
// Generate ack for slave.
SDA_LO;
__no_operation();
__no_operation();
i2c_delay_us(1);
SCL_HI;
__no_operation();
__no_operation();
i2c_delay_us(5);
SCL_LO;
i2c_delay_us(2);
//After receiving one byte of data SCL and SDA are both low.
return Data;
}
//////////////////////////////////////////////////
void I2C_Master_Init(void) //P1.4=DATA,=58KHZ 17us;
/**
* Initializes I2C. Makes SCL and SDA high.
*/
{
//bit banging
P1SEL &= ~(SCL | SDA); //&= ~��0�� Set GPIO function
P1OUT &= ~(SDA | SCL);
I2C_SetSCL_Low(); //although not required but want to make sure SCL is low when SDA goes high
I2C_SetSDA_High();
__no_operation();
i2c_delay_us(5);
I2C_SetSCL_High();
__no_operation();
i2c_delay_us(5);
}
//////////////////////////////////////////////////
/* I2C SDA and SCL Lines */
void I2C_SetSDA_High (void)
{
P1DIR &= ~SDA;
}
//////////////////////////////////////////////////
void I2C_SetSDA_Low (void)
{
P1DIR |= SDA;
}
//////////////////////////////////////////////////
BOOL I2C_GetSDA_Input (void)
{
return (P1IN & SDA ? 1 : 0);
}
//////////////////////////////////////////////////
void I2C_SetSCL_High (void)
{
P1DIR &= ~SCL;
}
//////////////////////////////////////////////////
void I2C_SetSCL_Low (void)
{
P1DIR |= SCL;
}
//////////////////////////////////////////////////
BOOL I2C_GetSCL_Input (void)
{
return (P1IN & SCL ? 1 : 0);
}
#if 0
void i2c_hw_init(void)//P1.4 and P1.5 不支持硬件
{
P1SEL |= BIT6 + BIT7; // Assign I2C pins to USCI_B0
P1SEL2|= BIT6 + BIT7; // Assign I2C pins to USCI_B0
UCB0CTL1 |= UCSWRST; // Enable SW reset
UCB0CTL0 = UCMST+UCMODE_3+UCSYNC; // I2C Master, synchronous mode
UCB0CTL1 = UCSSEL_2+UCSWRST; // Use SMCLK, keep SW reset
UCB0BR0 = 12; // fSCL = SMCLK/12 = ~100kHz
UCB0BR1 = 0;
//UCB0I2CSA = 0x20; // Set slave address
UCB0CTL1 &= ~UCSWRST; // Clear SW reset, resume operation
//IE2 |= UCB0TXIE;
}
void set_devaddr(uint08 dev_addr)
{
UCB0I2CSA = dev_addr >> 1;
}
unsigned char iic1_buffer[16];
int i2c_hw_write(uint08 dev_addr, int32 inlen, unsigned char *pdata)
{
volatile int32 i;
set_devaddr(dev_addr);
while (UCB0CTL1 & UCTXSTP); // Ensure stop condition got sent
//i = UCB0STAT;
UCB0CTL1 |= UCTR + UCTXSTT;
//while (UCB0CTL1 & UCTXSTT);
for(i = 0; i < inlen; i++)
{
//while(((IFG2 & UCB0TXIFG) == 0) && ((UCB0STAT & 0x08) == 0));
while(((IFG2 & UCB0TXIFG) == 0));
if(UCB0STAT & 0x08)
{
UCB0CTL1 |= UCTXSTP;
while (UCB0CTL1 & UCTXSTP);
return -1;
}
UCB0TXBUF = pdata[i];
}
UCB0CTL1 |= UCTXSTP;
while (UCB0CTL1 & UCTXSTP);
return 1;
}
int i2c_hw_read(uint08 dev_addr, int32 inlen, unsigned char *pdata)
{
int32 i;
set_devaddr(dev_addr);
while (UCB0CTL1 & UCTXSTP); // Ensure stop condition got sent
UCB0CTL1 &= ~UCTR;
UCB0CTL1 |= UCTXSTT;
//while (UCB0CTL1 & UCTXSTT);
for(i = 0; i < inlen; i++)
{
//while(((IFG2 & UCB0RXIFG) == 0) && ((UCB0STAT & UCNACKIFG) == 0));
while((IFG2 & UCB0RXIFG) == 0);
if(UCB0STAT & UCNACKIFG)
{
UCB0CTL1 |= UCTXSTP;
while (UCB0CTL1 & UCTXSTP);
return -1;
}
pdata[i] = UCB0RXBUF;
if(i == inlen - 1)
{
UCB0CTL1 |= UCTXSTP;
}
}
while (UCB0CTL1 & UCTXSTP);
return 1;
}
int i2c_dpp_write(uint08 dev_addr, unsigned char cmd , int outlen, unsigned char *pdata)
{
int i;
for(i = 0; i < outlen; i++)
{
iic1_buffer[1+i] = pdata[i];
}
iic1_buffer[0] = cmd;
return i2c_hw_write(dev_addr, i, pdata);
}
int i2c_dpp_read(uint08 dev_addr, unsigned char cmd , int inlen, unsigned char *pdata)
{
unsigned char cc[2];
//cc[0] = 0x15;
cc[0] = cmd;
if(i2c_hw_write(dev_addr, 1, cc) < 1)
return -1;
return i2c_hw_read(dev_addr, inlen, pdata);
}
int i2c_sil9293_write(uint08 dev_addr, unsigned char cmd , int outlen, unsigned char *pdata)
{
int i;
for(i = 0; i < outlen; i++)
{
iic1_buffer[1+i] = pdata[i];
}
iic1_buffer[0] = cmd;
return i2c_hw_write(dev_addr, i, pdata);
}
int i2c_sil9293_read(uint08 dev_addr, unsigned char cmd , int inlen, unsigned char *pdata)
{
unsigned char cc[2];
cc[0] = cmd;
if(i2c_hw_write(dev_addr, 1, cc) < 1)
return -1;
return i2c_hw_read(dev_addr, inlen, pdata);
}
#endif
We have been debugging for a long time, and no problems have been found when checking the code. Please help the engineer to analyze it.
Thank you very much!
