Part Number: MSP430G2553
Other Parts Discussed in Thread: MSP430WARE
Hi,
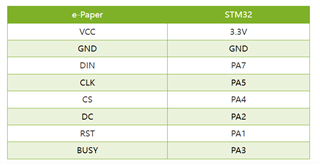
We are trying to interface 1.54" EPD with MSP430G2553LP. We have IAR code with us. here i am sharing the code file for reference.
// #include "io430.h"
#include "msp430.h"
#include "stdbool.h"
#include "stdint.h"
#define B(x) (0x01 << (x))
#define epdcklow P2OUT &= (~B(1))
#define epdckhigh P2OUT |= B(1)
#define epddalow P2OUT &= (~B(2))
#define epddahigh P2OUT |= B(2)
#define epdcslow P1OUT &= (~B(3))
#define epdcshigh P1OUT |= B(3)
#define epddclow P1OUT &= (~B(4))
#define epddchigh P1OUT |= B(4)
#define epdrstlow P1OUT &= (~B(5))
#define epdrsthigh P1OUT |= B(5)
#define READ_EPD_BUSY() (P2IN & (B(0)))
#define epdbslow P3OUT &= 0xfd
#define epdunknowhigh P3OUT &= 0x80
#define epdon P2OUT &= 0xbf
#define epdoff P2OUT |= 0x40
#define rfcklow P1OUT &= 0xef
#define rfckhigh P1OUT |= 0x10
#define rfdalow P1OUT &= 0xfb
#define rfdahigh P1OUT |= 0x04
#define rfcslow P1OUT &= 0xf7
#define rfcshigh P1OUT |= 0x08
#define rfon P2OUT &= 0x7f
#define rfoff P2OUT |= 0x80
#define spiromcshigh P3OUT |= 0x01
#define spiromcslow P3OUT &= 0xfe
void InitClk(void);
void InitGpio(void);
void InitEpd(void);
void sendbyte(uint8_t sdbyte);
void epd_send_cmd(int cmd);
void epd_sendcmddata(int cmd, int data);
void Delay(unsigned int nCount);
void Delaylong(unsigned int n10Count);
extern const unsigned char img1[];
extern const unsigned char img2[];
extern const unsigned char epdinit[];
#define EPD_Y_RAW_PIXELS 200
#define EPD_X_RAW_PIXELS 200
// const uint8_t GDOControl[] = {0x01, (EPD_Y_RAW_PIXELS - 1) % 256,
// (EPD_Y_RAW_PIXELS - 1) / 256, 0x00}; //for 1.54inch
const uint8_t GDOControl[] = {0x01, 0xF9, 0x00};
const uint8_t EPD_BSSC[] = {0x0c, 0xd7, 0xd6, 0x9d};
const uint8_t EPD_SDLP[] = {0x3a, 0x00}; // 4 dummy line per gate
const uint8_t EPD_SGLW[] = {0x3b, 0x00}; // 2us per line
const uint8_t EPD_DEMS[] = {0x11, 0x03};
const uint8_t EPD_SRAMXASE[] = {0x44, 0x00, 0x0f};
const uint8_t EPD_SRAMYASE[] = {0x45, 0x00, 0xf9};
const uint8_t EPD_VCOMVol[] = {0x2c, 0xA0};
const uint8_t EPD_UNKNOWN[] = {0x02, 0x21, 0x83};
// uint8_t EPD_buffer[500];
/*
const uint8_t LUTDefault_full[] = {
0x32, // command
0x50, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0x55, 0x55, 0x55, 0x55, 0x55,
0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0x11, 0x00, 0x00, 0x00, 0x00, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x01, 0x00, 0x00, 0x00};
const uint8_t LUTDefault_part[] = {
0x32, // command
0x11, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x17, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
*/
const uint8_t EPD_LUT[] = {0x33, 0x32, 0x66, 0x66, 0x26, 0x04, 0x55, 0xaa,
0x08, 0x91, 0x11, 0x88, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x19, 0x19, 0x0a, 0x0a, 0x5e, 0x1e,
0x1e, 0x0a, 0x39, 0x14, 0x00, 0x00, 0x00};
void EPD_writeCommandData(const uint8_t *pCD, uint8_t len);
int main(void) {
// Stop watchdog timer to prevent time out reset
WDTCTL = WDTPW + WDTHOLD;
InitGpio();
InitClk();
InitEpd();
epd_sendcmddata(0x4e, 0x0);
epd_sendcmddata(0x4f, 0x0);
epd_send_cmd(0x24); // write ram
epdcshigh;
epdcslow;
for (unsigned int s = 0; s < 4000; s++) {
sendbyte(~img1[s]);
}
epdcshigh;
while (1) {
epd_sendcmddata(0x22, 0xc7);
epd_send_cmd(0x20);
while (READ_EPD_BUSY())
;
Delaylong(100);
}
}
void EPD_wait() {
while (READ_EPD_BUSY())
;
}
void InitEpd(void) {
// unsigned char i;
epd_send_cmd(0x12);
// Delaylong(1);
while (READ_EPD_BUSY())
;
/*
EPD_writeCommandData(GDOControl, sizeof(GDOControl));
// EPD_writeCommandData(softstart, sizeof(softstart));
EPD_writeCommandData(EPD_SDLP, sizeof(EPD_SDLP));
EPD_writeCommandData(EPD_SGLW, sizeof(EPD_SGLW));
EPD_writeCommandData(EPD_DEMS, sizeof(EPD_DEMS));
EPD_writeCommandData(EPD_SRAMXASE, sizeof(EPD_SRAMXASE));
EPD_writeCommandData(EPD_SRAMYASE, sizeof(EPD_SRAMYASE));
EPD_writeCommandData(EPD_VCOMVol, sizeof(EPD_VCOMVol));
EPD_writeCommandData(EPD_LUT, sizeof(EPD_LUT));
// EPD_writeCommandData(EPD_UNKNOWN, sizeof(EPD_UNKNOWN));
*/
for (uint8_t i = 0; i <= 0x33; i++) {
if ((i == 0x0) || (i == 0x3) || (i == 0x5) || (i == 0x7) || (i == 0x9) ||
(i == 0xc) || (i == 0xf) || (i == 0x11) || (i == 0x13) || (i == 0x32)) {
epddclow;
}
epdcslow;
sendbyte(epdinit[i]);
epdcshigh;
epddchigh;
while (READ_EPD_BUSY())
;
}
}
uint16_t EPD_linebuffer[((EPD_Y_RAW_PIXELS / 16) + 1)];
const uint8_t *EPD_linebuffer8 = (uint8_t *)(&EPD_linebuffer[0]);
const uint8_t _EPD_STRETCH_LUT[] = { 0x02, 0x02, 0x01, 0x11, 0x12, 0x12, 0x22, 0x22,
0x66, 0x69, 0x69, 0x59, 0x58, 0x99, 0x99, 0x88,
0x00, 0x00, 0x00, 0x00, 0xF8, 0xB4, 0x13, 0x51,
0x35, 0x51, 0x51, 0x19, 0x01, 0x00}
EPD_stretch(uint8_t byte)
{
uint8_t buf[2];
buf[0] = _EPD_STRETCH_LUT[(byte & 0x0F)];
buf[1] = _EPD_STRETCH_LUT[(byte >> 4)];
return *((uint16_t *)buf);
}
void InitGpio(void) {
// rfcslow;
// rfcklow;
// rfdalow;
// spiromcslow;
// epdunknowhigh;
// epdbslow ;
// epdon;
// rfoff;
P1DIR = B(3) | B(4) | B(5);
P2DIR = B(1) | B(2);
P1SEL = 0x00;
P1SEL2 = 0x00;
P2SEL = 0x00;
P2SEL2 = 0x00;
P3SEL = 0x00;
P3SEL2 = 0x00;
Delaylong(1);
epdrsthigh;
Delaylong(1);
epdrstlow;
Delaylong(1);
epdrsthigh;
}
void InitClk(void) {
DCOCTL = 0x0000;
BCSCTL1 = CALBC1_16MHZ; // Set range
DCOCTL = CALDCO_16MHZ;
BCSCTL3 |= LFXT1S_2; /* Mode 2 for LFXT1 : VLO */
IFG1 &= !(OFIFG);
Delay(512);
BCSCTL1 |= DIVA_0; /* ACLK Divider 3: /8 */
}
void epd_sendcmddata(int cmd, int data) {
epddclow;
epdcslow;
sendbyte(cmd);
epddchigh;
sendbyte(data);
epdcshigh;
}
void epd_send_cmd(int cmd)
{
epddclow;
epdcslow;
sendbyte(cmd);
epdcshigh;
epddchigh;
}
void sendbyte(uint8_t sdbyte) {
epdcklow;
if (sdbyte & 0x80) epddahigh; else epddalow;
epdckhigh;
epdcklow;
if (sdbyte & 0x40) epddahigh; else epddalow;
epdckhigh;
epdcklow;
if (sdbyte & 0x20) epddahigh; else epddalow;
epdckhigh;
epdcklow;
if (sdbyte & 0x10) epddahigh; else epddalow;
epdckhigh;
epdcklow;
if (sdbyte & 0x08) epddahigh; else epddalow;
epdckhigh;
epdcklow;
if (sdbyte & 0x04) epddahigh; else epddalow;
epdckhigh;
epdcklow;
if (sdbyte & 0x02) epddahigh; else epddalow;
epdckhigh;
epdcklow;
if (sdbyte & 0x01) epddahigh; else epddalow;
epdckhigh;
epdcklow;
}
void EPD_writeCommandData(const uint8_t *pCD, uint8_t len) {
EPD_wait();
epddclow;
epdcslow;
sendbyte(*pCD++);
epddchigh;
for (uint8_t i = 0; i < len - 1; i++)
sendbyte(*pCD++);
epdcshigh;
asm("NOP");
asm("NOP");
}
void Delay(unsigned int nCount) {
for (; nCount != 0; nCount--) {
asm("NOP");
asm("NOP");
asm("NOP");
asm("NOP");
}
}
void Delaylong(unsigned int n10Count) {
unsigned char i;
while (n10Count--) {
for (i = 0; i < 10; i++) {
Delay(10000);
}
}
}
Iam unable to compile the code. Can anyone please guide me through the code and help me out to resolve the issue.
Thank you in advance.