Part Number: EVM430-FR6047
hi there.
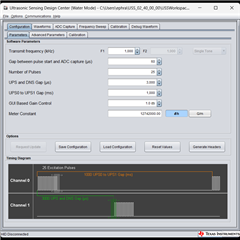
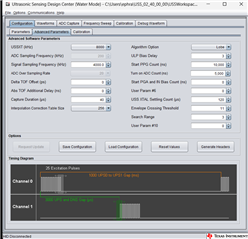
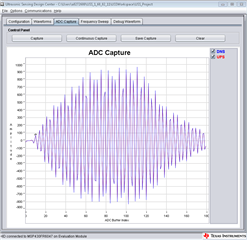
in the project MSP430FR6043EVM_USS_Water_Demo, point me to which variable/variables is/are read to obtain the ADC capture. both here, and continuous capture.
thanks,
Part Number: EVM430-FR6047
hi there.
in the project MSP430FR6043EVM_USS_Water_Demo, point me to which variable/variables is/are read to obtain the ADC capture. both here, and continuous capture.
thanks,
**Attention** This is a public forum