We are bringing online our own boards and sensor bodies and seeing issues we didn't see with the dev board and 3D printed sensors we were using. We are using the same transducers and the sensor bodies are essentially the same. Transducers are 300 kHz.
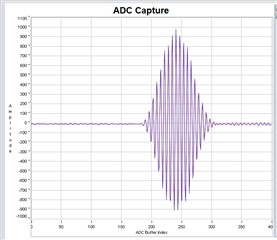
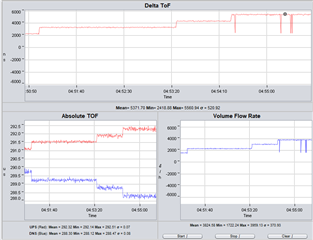
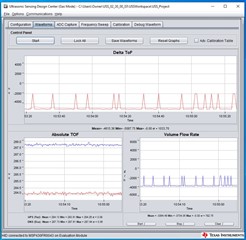
The first image shows the running data and the spikes we are seeking. This is with gas flowing through the sensor. Gas flow is controlled by a flow meter so it is very consistent. The spikes are fairly large.
.
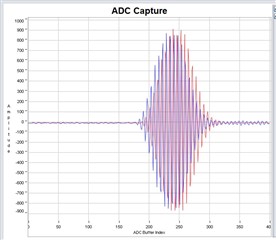
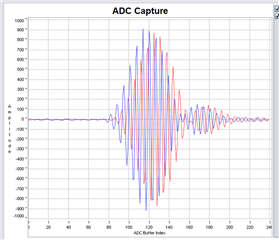
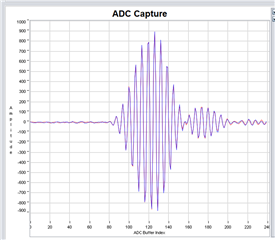
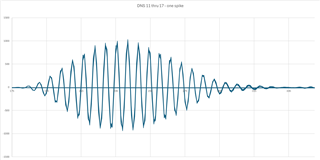
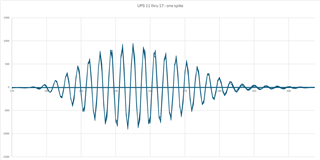
The next set of images show the Up and Down waveforms superimposed on each other. This is at least 7 passes. They look very consistent and clean to us. At least 1 of the seven waves corresponds to a spike in the Delta TOF.
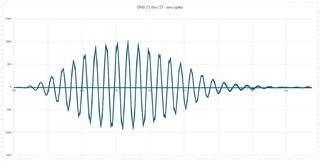
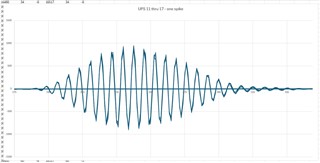
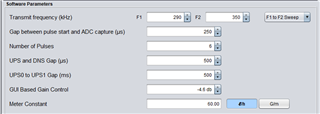
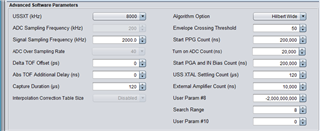
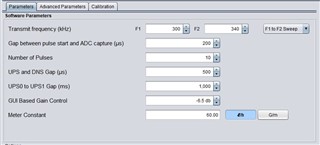
We are using these settings currently.
Is this a tuning issue or something with the Algorithm setup, or is there some other issue we are fighting? Looking for help knowing where to focus our efforts.
Any help is greatly appreciated.