


Part Number: MSP430G2553
Tool/software:
Hi: Thank you in advance for any help on this issue.
I am attempting to monitor the timing of pulses from a hall effect sensor connected to P2.5 of a MSP430G2553 chip on a launchpad.
As is, the timerA never starts and the TA1R register remains at zero. When I comment out the InitHallSensor() code, the timer counts up as expected.
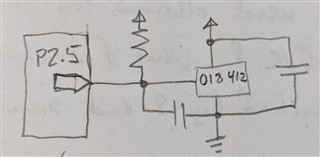
Also, the hall sensor circuit gives correct pulsing when the pin 13 of the launchpad (P2.5) is disconnected but remains low when it is connected (as detected on scope).
I am trying to keep things simple and not using digital I/O of the port/pin. Do I have to use port interrupts (pin as digital I/O) or can I skip that and go directly to trigger the timer capture interrupt through CCI2B input as indicated on the MSP430G2553 datasheet?
Here is my circuit for the hall effect sensor (018 412).
Here is my code.
#include <intrinsics.h>
#include <msp430.h>
#include <stdio.h>
#include <stdint.h>
void InitPorts(void);
void InitHallSensor(void);
#define SENSOR_PIN BIT5 //attach hall sensor to P2_5 TA1.2
volatile unsigned int cntOvrFloTAR = 0;
volatile uint16_t currTimerCounts = 4;
int main(void)
{
WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer
//set up Basic Clock Module
BCSCTL1 |= DIVA_3; //this write clears all other bits; divide ACLK/8
BCSCTL3 |= XCAP_3; //sets internal capacitance for watch crystal
InitPorts();
InitHallSensor();
//Set up Timer1A
// capture on rising edge, CCI2B input, synchronous cap, capture mode, ints enabled
TA1CCTL2 = CM_1 | CCIS_1 | CAP | CCIE | SCS;
// Continuous, divide clock by 1, ACLK, clear, enable
TA1CTL = MC_2 | ID_0 | TASSEL_1 | TACLR | TAIE;
__enable_interrupt();
for(;;){
// wait
}
}
#pragma vector = TIMER1_A1_VECTOR
__interrupt void TIMER1_A1_ISR (void){
switch (__even_in_range(TA1IV, 10)){
case 0:
break;
case TA1IV_TACCR2:
TA1CCTL2 &= ~CCIE; // disable further CCIE interrupts
currTimerCounts = TA1CCR2;
cntOvrFloTAR = 0; //reset TAR rollover counter
TA1CCTL2 &= ~CCIFG; // clear the CCRO flag
TA1CCTL2 |= CCIE; //enable interrupts
break;
case TA1IV_TAIFG:
++cntOvrFloTAR;
break;
default:
for (;;){
//Should not be possible
}
}
}
void InitPorts(void){
P1OUT = 0;
P1DIR = 0xFF;
P2OUT = 0;
P2DIR = 0xFF;
}
void InitHallSensor(void){
P2DIR &= ~SENSOR_PIN; //Set pin as input
P2SEL = SENSOR_PIN; //Set pin for Timer1_A CCI1A capture
}

