Other Parts Discussed in Thread: TDC7200EVM
Tool/software:
Hi Ti family,
I am currently working on establishing SPI communication between the MSP430FR6047EVM and the TDC7200EVM. I have configured the following pins on the MSP430 for SPI communication:
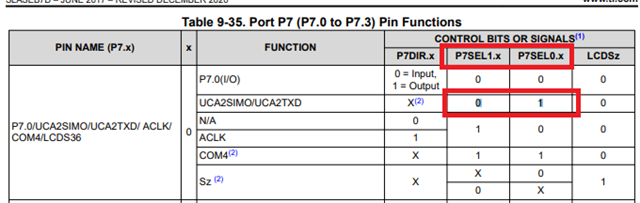
- P7.0 - MISO (Master In Slave Out)
- P7.1 - MOSI (Master Out Slave In)
- P7.2 - SCLK (Serial Clock)
- P7.3 - CS (Chip Select)
I have attached the source code below for the SPI communication setup. The issue I am facing is that when I run this code, I am not seeing any clock signal (SCLK) or data (DIN) being transmitted to the TDC7200EVM.
I have double-checked the wiring and confirmed that the connections are correct, but the communication doesn't seem to work as expected. There is no clock signal appearing at the SCLK pin of the TDC7200EVM, and no data is being received at the DIN pin.
Could anyone help me by reviewing the code and providing some insight into what might be wrong?
#include <msp430.h>
#include <stdint.h>
//******************************************************************************
// Pin Config ******************************************************************
//******************************************************************************
#define SLAVE_CS_OUT P7OUT
#define SLAVE_CS_DIR P7DIR
#define SLAVE_CS_PIN BIT3
#define SLAVE_RST_OUT P7OUT
#define SLAVE_RST_DIR P7DIR
#define SLAVE_RST_PIN BIT5
#define BUTTON_DIR P1DIR
#define BUTTON_OUT P1OUT
#define BUTTON_REN P1REN
#define BUTTON_PIN BIT3
#define BUTTON_IES P1IES
#define BUTTON_IE P1IE
#define BUTTON_IFG P1IFG
#define BUTTON_VECTOR PORT1_VECTOR
#define BUTTON_LED_OUT P1OUT
#define BUTTON_LED_DIR P1DIR
#define BUTTON_LED_PIN BIT1
#define COMMS_LED_OUT P1OUT
#define COMMS_LED_DIR P1DIR
#define COMMS_LED_PIN BIT0
//******************************************************************************
// Example Commands ************************************************************
//******************************************************************************
#define DUMMY 0xFF
/* CMD_TYPE_X_SLAVE are example commands the master sends to the slave.
* The slave will send example SlaveTypeX buffers in response.
*
* CMD_TYPE_X_MASTER are example commands the master sends to the slave.
* The slave will initialize itself to receive MasterTypeX example buffers.
* */
#define CMD_TYPE_0_SLAVE 0
#define CMD_TYPE_1_SLAVE 1
#define CMD_TYPE_2_SLAVE 2
#define CMD_TYPE_0_MASTER 3
#define CMD_TYPE_1_MASTER 4
#define CMD_TYPE_2_MASTER 5
#define TYPE_0_LENGTH 1
#define TYPE_1_LENGTH 2
#define TYPE_2_LENGTH 6
#define MAX_BUFFER_SIZE 20
/* MasterTypeX are example buffers initialized in the master, they will be
* sent by the master to the slave.
* SlaveTypeX are example buffers initialized in the slave, they will be
* sent by the slave to the master.
* */
uint8_t MasterType0 [TYPE_0_LENGTH] = {0x11};
uint8_t MasterType1 [TYPE_1_LENGTH] = {8, 9};
uint8_t MasterType2 [TYPE_2_LENGTH] = {'F', '4' , '1' , '9', '2', 'B'};
uint8_t SlaveType2 [TYPE_2_LENGTH] = {0};
uint8_t SlaveType1 [TYPE_1_LENGTH] = {0};
uint8_t SlaveType0 [TYPE_0_LENGTH] = {0};
//******************************************************************************
// General SPI State Machine ***************************************************
//******************************************************************************
typedef enum SPI_ModeEnum{
IDLE_MODE,
TX_REG_ADDRESS_MODE,
RX_REG_ADDRESS_MODE,
TX_DATA_MODE,
RX_DATA_MODE,
TIMEOUT_MODE
} SPI_Mode;
/* Used to track the state of the software state machine*/
SPI_Mode MasterMode = IDLE_MODE;
/* The Register Address/Command to use*/
uint8_t TransmitRegAddr = 0;
/* ReceiveBuffer: Buffer used to receive data in the ISR
* RXByteCtr: Number of bytes left to receive
* ReceiveIndex: The index of the next byte to be received in ReceiveBuffer
* TransmitBuffer: Buffer used to transmit data in the ISR
* TXByteCtr: Number of bytes left to transfer
* TransmitIndex: The index of the next byte to be transmitted in TransmitBuffer
* */
uint8_t ReceiveBuffer[MAX_BUFFER_SIZE] = {0};
uint8_t RXByteCtr = 0;
uint8_t ReceiveIndex = 0;
uint8_t TransmitBuffer[MAX_BUFFER_SIZE] = {0};
uint8_t TXByteCtr = 0;
uint8_t TransmitIndex = 0;
/* SPI Write and Read Functions */
/* For slave device, writes the data specified in *reg_data
*
* reg_addr: The register or command to send to the slave.
* Example: CMD_TYPE_0_MASTER
* *reg_data: The buffer to write
* Example: MasterType0
* count: The length of *reg_data
* Example: TYPE_0_LENGTH
* */
SPI_Mode SPI_Master_WriteReg(uint8_t reg_addr, uint8_t *reg_data, uint8_t count);
/* For slave device, read the data specified in slaves reg_addr.
* The received data is available in ReceiveBuffer
*
* reg_addr: The register or command to send to the slave.
* Example: CMD_TYPE_0_SLAVE
* count: The length of data to read
* Example: TYPE_0_LENGTH
* */
SPI_Mode SPI_Master_ReadReg(uint8_t reg_addr, uint8_t count);
void CopyArray(uint8_t *source, uint8_t *dest, uint8_t count);
void SendUCA2Data(uint8_t val);
void SendUCA2Data(uint8_t val)
{
while (!(UCA2IFG & UCTXIFG)); // USCI_B0 TX buffer ready?
UCA2TXBUF = val;
}
void CopyArray(uint8_t *source, uint8_t *dest, uint8_t count)
{
uint8_t copyIndex = 0;
for (copyIndex = 0; copyIndex < count; copyIndex++)
{
dest[copyIndex] = source[copyIndex];
}
}
SPI_Mode SPI_Master_WriteReg(uint8_t reg_addr, uint8_t *reg_data, uint8_t count)
{
MasterMode = TX_REG_ADDRESS_MODE;
TransmitRegAddr = reg_addr;
//Copy register data to TransmitBuffer
CopyArray(reg_data, TransmitBuffer, count);
TXByteCtr = count;
RXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
SLAVE_CS_OUT &= ~(SLAVE_CS_PIN);
SendUCA2Data(TransmitRegAddr);
__bis_SR_register(GIE); // Enter LPM0 w/ interrupts
SLAVE_CS_OUT |= SLAVE_CS_PIN;
return MasterMode;
}
SPI_Mode SPI_Master_ReadReg(uint8_t reg_addr, uint8_t count)
{
MasterMode = TX_REG_ADDRESS_MODE;
TransmitRegAddr = reg_addr;
RXByteCtr = count;
TXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
SLAVE_CS_OUT &= ~(SLAVE_CS_PIN);
SendUCA2Data(TransmitRegAddr);
__bis_SR_register(CPUOFF + GIE); // Enter LPM0 w/ interrupts
SLAVE_CS_OUT |= SLAVE_CS_PIN;
return MasterMode;
}
//******************************************************************************
// Device Initialization *******************************************************
//******************************************************************************
void initSPI()
{
// Configure SPI
P7SEL0 &= ~(BIT0 | BIT1 | BIT2);
P7SEL1 |= BIT0 | BIT1 | BIT2;
//Clock Polarity: The inactive state is high
//MSB First, 8-bit, Master, 3-pin mode, Synchronous
UCA2CTLW0 = UCSWRST; // **Put state machine in reset**
UCA2CTLW0 |= UCCKPL | UCMSB | UCSYNC
| UCMST | UCSSEL__SMCLK; // 3-pin, 8-bit SPI Slave
UCA2BRW = 0x20;
UCA2MCTLW = 0;
UCA2CTLW0 &= ~UCSWRST; // **Initialize USCI state machine**
UCA2IE |= UCRXIE; // Enable USCI0 RX interrupt
}
void initGPIO()
{
//LEDs
COMMS_LED_DIR |= COMMS_LED_PIN;
COMMS_LED_OUT &= ~COMMS_LED_PIN;
BUTTON_LED_DIR |= BUTTON_LED_PIN;
BUTTON_LED_OUT &= ~BUTTON_LED_PIN;
SLAVE_RST_DIR |= SLAVE_RST_PIN;
SLAVE_RST_OUT |= SLAVE_RST_PIN;
SLAVE_CS_DIR |= SLAVE_CS_PIN;
SLAVE_CS_OUT |= SLAVE_CS_PIN;
//Button to initiate transfer
BUTTON_DIR &= ~(BUTTON_PIN); // button input
BUTTON_OUT |= BUTTON_PIN; // button pull up
BUTTON_REN |= BUTTON_PIN; // button pull up/down resistor enable
BUTTON_IES |= BUTTON_PIN; // button Hi/lo edge
BUTTON_IE |= BUTTON_PIN; // button interrupt enabled
// Disable the GPIO power-on default high-impedance mode to activate
// previously configured port settings
PM5CTL0 &= ~LOCKLPM5;
BUTTON_IFG &= ~BUTTON_PIN; // button IFG cleared
}
void initClockTo16MHz()
{
// Configure one FRAM waitstate as required by the device datasheet for MCLK
// operation beyond 8MHz _before_ configuring the clock system.
FRCTL0 = FRCTLPW | NWAITS_1;
// Clock System Setup
CSCTL0_H = CSKEY_H; // Unlock CS registers
CSCTL1 = DCOFSEL_0; // Set DCO to 1MHz
// Set SMCLK = MCLK = DCO, ACLK = LFXTCLK (VLOCLK if unavailable)
CSCTL2 = SELA__LFXTCLK | SELS__DCOCLK | SELM__DCOCLK;
// Per Device Errata set divider to 4 before changing frequency to
// prevent out of spec operation from overshoot transient
CSCTL3 = DIVA__4 | DIVS__4 | DIVM__4; // Set all corresponding clk sources to divide by 4 for errata
CSCTL1 = DCOFSEL_4 | DCORSEL; // Set DCO to 16MHz
// Delay by ~10us to let DCO settle. 60 cycles = 20 cycles buffer + (10us / (1/4MHz))
__delay_cycles(60);
CSCTL3 = DIVA__1 | DIVS__1 | DIVM__1; // Set all dividers to 1 for 16MHz operation
CSCTL0_H = 0; // Lock CS registers
}
//******************************************************************************
// Main ************************************************************************
// Send and receive three messages containing the example commands *************
//******************************************************************************
int main(void) {
WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
initClockTo16MHz();
initGPIO();
initSPI();
SLAVE_RST_OUT &= ~SLAVE_RST_PIN; // Now with SPI signals initialized,
__delay_cycles(100000);
SLAVE_RST_OUT |= SLAVE_RST_PIN; // reset slave
__delay_cycles(100000); // Wait for slave to initialize
COMMS_LED_OUT |= COMMS_LED_PIN;
__bis_SR_register(LPM0_bits + GIE); // CPU off, enable interrupts
SPI_Master_ReadReg(CMD_TYPE_2_SLAVE, TYPE_2_LENGTH);
CopyArray(ReceiveBuffer, SlaveType2, TYPE_2_LENGTH);
SPI_Master_ReadReg(CMD_TYPE_1_SLAVE, TYPE_1_LENGTH);
CopyArray(ReceiveBuffer, SlaveType1, TYPE_1_LENGTH);
SPI_Master_ReadReg(CMD_TYPE_0_SLAVE, TYPE_0_LENGTH);
CopyArray(ReceiveBuffer, SlaveType0, TYPE_0_LENGTH);
SPI_Master_WriteReg(CMD_TYPE_2_MASTER, MasterType2, TYPE_2_LENGTH);
SPI_Master_WriteReg(CMD_TYPE_1_MASTER, MasterType1, TYPE_1_LENGTH);
SPI_Master_WriteReg(CMD_TYPE_0_MASTER, MasterType0, TYPE_0_LENGTH);
__bis_SR_register(LPM0_bits + GIE);
__no_operation();
return 0;
}
//******************************************************************************
// SPI Interrupt ***************************************************************
//******************************************************************************
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=USCI_A2_VECTOR
__interrupt void USCI_A2_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCI_A2_VECTOR))) USCI_A2_ISR (void)
#else
#error Compiler not supported!
#endif
{
uint8_t uca2_rx_val = 0;
switch(__even_in_range(UCA2IV, USCI_SPI_UCTXIFG))
{
case USCI_NONE: break;
case USCI_SPI_UCRXIFG:
uca2_rx_val = UCA2RXBUF;
UCA2IFG &= ~UCRXIFG;
switch (MasterMode)
{
case TX_REG_ADDRESS_MODE:
if (RXByteCtr)
{
MasterMode = RX_DATA_MODE; // Need to start receiving now
//Send Dummy To Start
__delay_cycles(2000000);
SendUCA2Data(DUMMY);
}
else
{
MasterMode = TX_DATA_MODE; // Continue to transmision with the data in Transmit Buffer
//Send First
SendUCA2Data(TransmitBuffer[TransmitIndex++]);
TXByteCtr--;
}
break;
case TX_DATA_MODE:
if (TXByteCtr)
{
SendUCA2Data(TransmitBuffer[TransmitIndex++]);
TXByteCtr--;
}
else
{
//Done with transmission
MasterMode = IDLE_MODE;
__bic_SR_register_on_exit(CPUOFF); // Exit LPM0
}
break;
case RX_DATA_MODE:
if (RXByteCtr)
{
ReceiveBuffer[ReceiveIndex++] = uca2_rx_val;
//Transmit a dummy
RXByteCtr--;
}
if (RXByteCtr == 0)
{
MasterMode = IDLE_MODE;
__bic_SR_register_on_exit(CPUOFF); // Exit LPM0
}
else
{
SendUCA2Data(DUMMY);
}
break;
default:
__no_operation();
break;
}
__delay_cycles(1000);
break;
case USCI_SPI_UCTXIFG:
break;
default: break;
}
}
//******************************************************************************
// Button Port Interrupt *************************************************************
// Interrupt occurs on button press and initiates the SPI data transfer ********
//******************************************************************************
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=BUTTON_VECTOR
__interrupt void Button_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(BUTTON_VECTOR))) Button_ISR (void)
#else
#error Compiler not supported!
#endif
{
BUTTON_LED_OUT |= BUTTON_LED_PIN;
BUTTON_IFG &= ~BUTTON_PIN; // button IFG cleared
BUTTON_IE &= ~BUTTON_PIN;
//Initiate
__bic_SR_register_on_exit(LPM0_bits); // Exit LPM0
}