


Part Number: MSP430FR2476
Tool/software:
Hi,
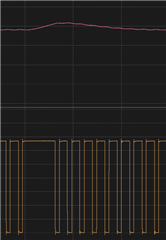
I'm working with the MSP430FR4276 microcontroller and encountering an issue while generating a PWM signal using Timer_A3. The PWM duty cycle needs to be adjustable at any time by my PI controller. However, I'm facing a problem (as shown in the attached image) that I believe is related to the timing of when I update CCR1.
It seems that if I update CCR1 at the wrong moment, the compare event between CCR1 and CCR0 doesn't occur until the timer reaches its maximum value. As a result, the new duty cycle only takes effect in the next cycle.
The challenge is that I don't want to stop the timer using the MC bits, nor do I want to use interrupts (ISRs). According to the datasheet, shadow registers are used for this purpose and should be automatically handled by Timer_A_initCompareMode(). Therefore, I expected that simply calling:
Timer_A_setCompareValue(TA3_BASE, TIMER_A_CAPTURECOMPARE_REGISTER_1, newDutyCycle);
void MY_TIMER_init(void)
{
// Set up Timer_A3 in Up Mode
Timer_A_initUpModeParam upModeParams = {0};
upModeParams.clockSource = TIMER_A_CLOCKSOURCE_SMCLK;
upModeParams.clockSourceDivider = TIMER_A_CLOCKSOURCE_DIVIDER_1;
upModeParams.timerPeriod = 0xFFF;
upModeParams.timerInterruptEnable_TAIE = TIMER_A_TAIE_INTERRUPT_DISABLE;
upModeParams.captureCompareInterruptEnable_CCR0_CCIE = TIMER_A_CCIE_CCR0_INTERRUPT_DISABLE;
upModeParams.timerClear = TIMER_A_DO_CLEAR;
upModeParams.startTimer = false;
Timer_A_initUpMode(TA3_BASE, &upModeParams);
// Configure CCR1 for PWM output
Timer_A_initCompareModeParam compareParams = {0};
compareParams.compareRegister = TIMER_A_CAPTURECOMPARE_REGISTER_1;
compareParams.compareInterruptEnable = TIMER_A_CAPTURECOMPARE_INTERRUPT_DISABLE;
compareParams.compareOutputMode = TIMER_A_OUTPUTMODE_RESET_SET;
compareParams.compareValue = 0x7FF;
Timer_A_initCompareMode(TA3_BASE, &compareParams);
Timer_A_startCounter(TA3_BASE, TIMER_A_UP_MODE);
}
