A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
The reason why I want to clear the UCA0RXBUF is after I collect my 1st byte of data, I am still receiving serial data while I am transmitting, and I am falling out of sync at the receiver end.
If I can clear the UCA0RXBUF, than I know for sure that no remains from the previous interrupt is left.
The UART has a flag designed to resolve the concerns you have. This flag is called UCA0RXIFG, which is bit0 of IFG2 register. When you initially set up the UART, this flag should be cleared (=0). The UART is ready (and waiting) to receive incoming data. When the data arrives, it is stored in the UCA0RXBUF, the flag is automatically set (=1) and an interrupt is generated (if enabled). When you read UCA0RXBUF, the flag is automatically cleared (=0). When the next byte incoming data arrives, it will be stored in CA0RXBUF too. The flag will be set (=1) again and another interrupt will be generated again (if enabled). Thus if you use this mechanism properly, you will always get the all the UART incoming data once and only once.
I am testing the UART communications between MSP430G2553 and BNO055. I am sending 4 bytes as shown below and I must receive 3 bytes My question is how can I read these 3 bytes given that the UART buffer can accommodate one byte (as I understand).? And how can I read the receive buffer of the UART? And how can I turn on LED for a given received data?
Thank you
#include "msp430g2553.h"
void main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop the Watch dog
//------------------- Configure the Clocks -------------------//
if (CALBC1_12MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_12MHZ; // Set range
DCOCTL = CALDCO_12MHZ; // Set DCO step + modulation
//---------------- Configuring the LED's ----------------------//
P1DIR |= BIT0 + BIT6; // P1.0 and P1.6 output
P1OUT &= ~BIT0 + BIT6; // P1.0 and P1.6 = 0
//--------- Setting the UART function for P1.1 & P1.2 --------//
P1SEL |= BIT1 + BIT2; // P1.1 UCA0RXD input
P1SEL2 |= BIT1 + BIT2; // P1.2 UCA0TXD output
//------------ Configuring the UART(USCI_A0) ----------------//
UCA0CTL1 |= UCSWRST; // **Put state machine in reset**
UCA0CTL1 |= UCSSEL_3; // CLK = SMCLK
// 115200 BAUD, CLK=12MHz
UCA0BR0 = 6; //this is working
UCA0BR1 = 0; //this is working
//*ours: UCBRF = 8, UCBRS = 0, UCOS16 = 1
// UCBRF = 11, UCBRS = 0, UCOS16 = 1
// BITS| 7 6 5 4 | 3 2 1 | 0 |
// UCAxMCTL = | UCBRFx | UCBRSx | UCOS16 |
UCA0MCTL = 0x81; //this works fine
{
while( !(IFG2 & UCA0TXIFG) );
UCA0TXBUF = 0xAA; // Transmit a byte
while( !(IFG2 & UCA0TXIFG) );
UCA0TXBUF = 0x01; // Transmit 2nd byte
while( !(IFG2 & UCA0TXIFG) );
UCA0TXBUF = 0x00; // Transmit 3rd byte
while( !(IFG2 & UCA0TXIFG) );
UCA0TXBUF = 0x01; // Transmit 4th byte
}
}
Neither you, nor your code knows when RX data is arriving. To be able to read RXBUF with meaningful data, first you need to either keep checking the RXIFG in a loop, or enable both RXIE and GIE and catch it in ISR. After that you can read RXBUF for one byte of data.
To receive three bytes, you need to repeat the above sequence three times.
Would please do me a favor and check this piece of code for me. I am checking if the 3rd byte I am getting back is A0, then is so, the LEDs should be turned on, but there not.
Should I do the check inside the RX ISR? before it? or after it?
Thank you
#include "msp430g2553.h"
unsigned int i;
unsigned char data1;
unsigned char data2;
unsigned char data3;
void main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop the Watch dog
//------------------- Configure the Clocks -------------------//
if (CALBC1_12MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_12MHZ; // Set range
DCOCTL = CALDCO_12MHZ; // Set DCO step + modulation
//---------------- Configuring the LED's ----------------------//
P1DIR |= BIT0 + BIT6; // P1.0 and P1.6 output
P1OUT &= ~BIT0 + BIT6; // P1.0 and P1.6 = 0
//--------- Setting the UART function for P1.1 & P1.2 --------//
P1SEL |= BIT1 + BIT2; // P1.1 UCA0RXD input
P1SEL2 |= BIT1 + BIT2; // P1.2 UCA0TXD output
//------------ Configuring the UART(USCI_A0) ----------------//
UCA0CTL1 |= UCSWRST; // **Put state machine in reset**
UCA0CTL1 |= UCSSEL_3; // CLK = SMCLK
// 115200 BAUD, CLK=12MHz
UCA0BR0 = 6; //this is working
UCA0BR1 = 0; //this is working
//*ours: UCBRF = 8, UCBRS = 0, UCOS16 = 1
// UCBRF = 11, UCBRS = 0, UCOS16 = 1
// BITS| 7 6 5 4 | 3 2 1 | 0 |
// UCAxMCTL = | UCBRFx | UCBRSx | UCOS16 |
UCA0MCTL = 0x81; //this works fine
UCA0CTL1 &= ~UCSWRST; // Clear UCSWRST to enable USCI_A0-UART
//---------------- Enabling the interrupts ------------------//
IE2 |= UCA0RXIE; // Enable the Receive interrupt
_BIS_SR(GIE); // Enable the global interrupt
{
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
UCA0TXBUF = 0xAA; // Transmit a byte
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
UCA0TXBUF = 0x01; // Transmit 2nd byte
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
UCA0TXBUF = 0x00; // Transmit 3rd byte
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
UCA0TXBUF = 0x01; // Transmit 4th byte
}
}
#pragma vector=USCIAB0RX_VECTOR
__interrupt void USCI0RX_ISR(void) {
if (IFG2 & UCA0RXIFG) { // BNO055 response received
data1 = UCA0RXBUF; // Read 1st byte
}
if (IFG2 & UCB0RXIFG)
{ // BNO055 response received
data2 = UCB0RXBUF; // Send Character to UART
}
if (IFG2 & UCB0RXIFG)
{ // BNO055 response received
data3 = UCB0RXBUF; // Send Character to UART
}
if (data3 == 'A0')
{
P1OUT^=(BIT0+BIT6); // toggle the led's
for(i=0;i<20000;i++); // delay between the toggle.
}
else
P1OUT &= ~BIT0 + BIT6; // P1.0 and P1.6 = 0
}
if (data3 == 'A0') Warning[Pe1422]: multicharacter character literal (potential portability problem)
C is not a string aware language. What you are doing is this: cmp.w #0x4130,&data3
Never put a delay inside a ISR!!!!! plus a compiler in high optimization will warn that i is not used and/or just remove it. for(i=0;i<20000;i++); // delay between the toggle.
Your RX isr will not work like that, learn how to use pointers and length counter.
I appreciate your reply. But I would like to ask you for more help (actually I am a student and really stuck as the semester is about to get ended and also because I am not good in C programming...will take c course during summer).
Would you please take a look at the code below after I rearranged it?
The main function of this code is to send 4 bytes AA 01 00 01. And the received from the IMU (BNO055) should be BB 01 0A. So how can I check if the 3rd byte received is A0 and if so, turn on a LED? could please refer me to a piece of code does this?
And regarding uartstruct uart; I am getting an error message that the uartstruct is undefined?
Your help is highly appreciated
Thank you
Murtadha
#include "msp430g2553.h"
void setMSP430Pins() {
//---------------- Configuring the LED's ----------------------//
P1DIR |= BIT0 + BIT6; // P1.0 and P1.6 output
P1OUT &= ~BIT0 + BIT6; // P1.0 and P1.6 = 0
//--------- Setting the UART function for P1.1 & P1.2 --------//
P1SEL |= BIT1 + BIT2; // P1.1 UCA0RXD input
P1SEL2 |= BIT1 + BIT2; // P1.2 UCA0TXD output
return;
}
void set_UCS() {
//------------------- Configure the Clocks -------------------//
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_12MHZ; // Set range
DCOCTL = CALDCO_12MHZ; // Set DCO step + modulation
}
void uart_init(void){
IE2 &= ~(UCA0TXIE | UCA0RXIE | UCB0TXIE | UCB0RXIE); // Disable all USCIx0 TX & RX interrupts
UCA0CTL1 = UCSWRST; // Set UCSWRST (hold USCI in Reset state)
UCA0CTL1 |= UCSSEL_3; // CLK = SMCLK
//------------ Configuring the UART(USCI_A0) ----------------//
// 115200 BAUD, CLK=12MHz
UCA0BR0 = 6; //this is working
UCA0BR1 = 0; //this is working
//*ours: UCBRF = 8, UCBRS = 0, UCOS16 = 1
// UCBRF = 11, UCBRS = 0, UCOS16 = 1
// BITS| 7 6 5 4 | 3 2 1 | 0 |
// UCAxMCTL = | UCBRFx | UCBRSx | UCOS16 |
UCA0MCTL = 0x81; //this works fine
UCA0CTL1 &= ~UCSWRST; // Clear UCSWRST to enable USCI_A0-UART
IFG2 |= UCA0TXIFG; // preset IFG flag always left on
}
#define TXSTRING(pnt) (TXdata((pnt), sizeof(pnt)-1)) // cool macro to get string and string len
uartstruct uart; // declare a struct from typedef uartstruct
void TXdata( char* pnt, unsigned int len){
uart.bufpnt = pnt;
uart.buflen = len;
uart.bufRXpnt = uart.RXbuffer; // reset it to beginning of ram buffer
IE2 |= UCA0TXIE + UCA0RXIE; // enable USCI_A0 TX interrupt
}
//¦----------------------------- US0TX ISR ---------------------------------------¦
#pragma vector=USCIAB0TX_VECTOR
__interrupt void USCIAB0TX(void) // Shared A0/B0 TX IRQ vector
{
if (IFG2 & UCA0TXIFG){ // our USCI_A0 transmit Interrupt?
if (uart.buflen){ // if not zero
UCA0TXBUF = *uart.bufpnt++;
--uart.buflen;
}
else IE2 &= ~UCA0TXIE; // suspend IE if zero
}
else IFG2 &= ~UCB0TXIFG; // clear a false UCB0 trigger
}
//¦----------------------------- US0RX ISR ---------------------------------------¦
#pragma vector=USCIAB0RX_VECTOR
__interrupt void USCIAB0RX(void) // Shared A0/B0 RX IRQ vector
{
if (IFG2 & UCA0RXIFG){ // our USCI_A0 Recive Interrupt?
*uart.bufRXpnt++ = UCA0RXBUF; // copy data byte
}
else IFG2 &= ~UCB0RXIFG;
}
void main(void) {
WDTCTL = WDTPW + WDTHOLD; // Stop the Watch dog
setMSP430Pins();
set_UCS();
uart_init();
TXSTRING("\xAA\x01\x00\x01"); // hex escape inside a const string
}
typedef struct uartTag // UART
{ char *bufpnt; // tx buffer pointer
unsigned int buflen; // the lenght of tx block
char *bufRXpnt; // uartRX buffer pointer
char TXbuffer[10]; // not always used if pointer is to const
char RXbuffer[20]; // no protection against buffer overflow yet
} uartstruct;
while(1){
TXSTRING("\xAA\x01\x00\x01");
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0 Sleep with IRQ on
if (uart.RXbuffer[2] == 0xA0) P1OUT^=(BIT0+BIT6); // toggle the led's
__delay_cycles(12000); // small hard-loop delay
}
Make these <<<< additions to RX ISR
if (IFG2 & UCA0RXIFG){ // our USCI_A0 Recive Interrupt?
*uart.bufRXpnt++ = UCA0RXBUF; // copy data byte
if (uart.bufRXpnt == uart.RXbuffer+3) // got three bytes in yet? <<<<
__bic_SR_register_on_exit(LPM0_bits); // wakeup main <<<<
Many thanks Tony,
But just would like to make sure, I think uartTag should be uart only! since we are using it as this: uart.RXbuffer
So there is no Tag I guess!
print the result will be hard with only one uart, and many msp430 only have one uart. Uart does not play nicely with multi-master/slave so it will be hard temporary redirect to terminal, unless uart slave device has enable so you can tell it to ignore this data not meant for it.
But it would be easy to "resend" the data by just: TXdata(&uart.RXbuffer, 4); But you now need to enable terminal path way for TXpin , so you kind of need a multiplexer ic.
So that is why SPI and I2C is nicer as they handle multi-slave just fine.
Nope, G2553 only have these: A0 is uart/spi and B0 is spi/i2c so as you can see you have two spi.
bit banging 9600 is also possible with any free gpio. But you could try to route so msp TXpin so it goes both to your device and Launchpad's backdoor uart. And by switching from 115K to 9600 baud back-and-forth may keep your device from accepting this data. if it does have enable/power down pin, you would just use that to stop if from seeing the data.
Now what I did is I placed a break point after setting the register of the slave device and sending the reading command. Since I am reading acceleration, then I need to read 6 registers of the slave device (2 registers for the x-axis (MSB & LSB), similar for the y-axis and z-axis). I used the piece below. But with this I can read only one register. How to read 6 register instead of 1 (i.e. using xAA\x01\x08\x01 and changing the 3rd byte each time) and then checking the 3rd byte that I receive in the RX buffer?
Can I do that?
Can I check them all?
while(1){
TXSTRING("\xAA\x00\x3D\x01\x01"); // Send this to the BNO055 to set up the ACC mode
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
TXSTRING("\xAA\x01\x08\x01"); // Send this to the BNO055 to read the x-axis ACC data
__bis_SR_register(LPM0_bits + GIE); // else Enter LPM0
__delay_cycles(12000); // small hard-loop delay
}
}
Just a unrolled loop is probaly easiest here, as it's only 6. BNO055 also have i2c, that I would say is more robust as master is in control of data coming in not like uart when RX always have to be on standby.
TXSTRING("\xAA\x01\x08\x01"); // Send this to the BNO055 to read the x-axis ACC data
__bis_SR_register(LPM0_bits + GIE); // Then Enter LPM0
x = uart.RXbuffer[2];
TXSTRING("\xAA\x01\x09\x01"); // Send this to the BNO055 to read the y-axis ACC data
__bis_SR_register(LPM0_bits + GIE); // Then Enter LPM0
y = uart.RXbuffer[2];
TXSTRING("\xAA\x01\x10\x01"); // Send this to the BNO055 to read the z-axis ACC data
__bis_SR_register(LPM0_bits + GIE); // Then Enter LPM0
z = uart.RXbuffer[2];
...
Thank you Tonyy, I know that I2C is much better, but I have not mastered it., thus I started with UART
OK, so I defined these
char xLSB;
char xMSB;
char yLSB;
char yMSB;
char zLSB;
char zMSB;
and used the lines below as per your advice, but when checking xLSB, xMSB, etc. all there are 0x00!, what is wrong with what I am doing ?
while(1){
TXSTRING("\xAA\x00\x3D\x01\x01"); // Send this to the BNO055 to set up the ACC mode
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
TXSTRING("\xAA\x01\x08\x01"); // Send this to the BNO055 to read the x-axis ACC data
__bis_SR_register(LPM0_bits + GIE); // else Enter LPM0
xLSB = uart.RXbuffer[2];
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
TXSTRING("\xAA\x01\x09\x01"); // Send this to the BNO055 to read the x-axis ACC data
__bis_SR_register(LPM0_bits + GIE); // else Enter LPM0
xMSB = uart.RXbuffer[2];
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
TXSTRING("\xAA\x01\x0A\x01"); // Send this to the BNO055 to read the y-axis ACC data
__bis_SR_register(LPM0_bits + GIE); // else Enter LPM0
yLSB = uart.RXbuffer[2];
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
TXSTRING("\xAA\x01\x0B\x01"); // Send this to the BNO055 to read the y-axis ACC data
__bis_SR_register(LPM0_bits + GIE); // else Enter LPM0
yMSB = uart.RXbuffer[2];
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
TXSTRING("\xAA\x01\x0C\x01"); // Send this to the BNO055 to read the z-axis ACC data
__bis_SR_register(LPM0_bits + GIE); // else Enter LPM0
zLSB = uart.RXbuffer[2];
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
TXSTRING("\xAA\x01\x0D\x01"); // Send this to the BNO055 to read the z-axis ACC data
__bis_SR_register(LPM0_bits + GIE); // else Enter LPM0
zMSB = uart.RXbuffer[2];
__delay_cycles(5000); // small hard-loop delay
}
while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
Can not use that, in this TX IRQ system IFG flag is never cleared as iE is enabled/disabled instead. As sending data, next chance to send more data will be after RX IRQ have recived 3 bytes and by that time TX is definitely ready for more bytes.
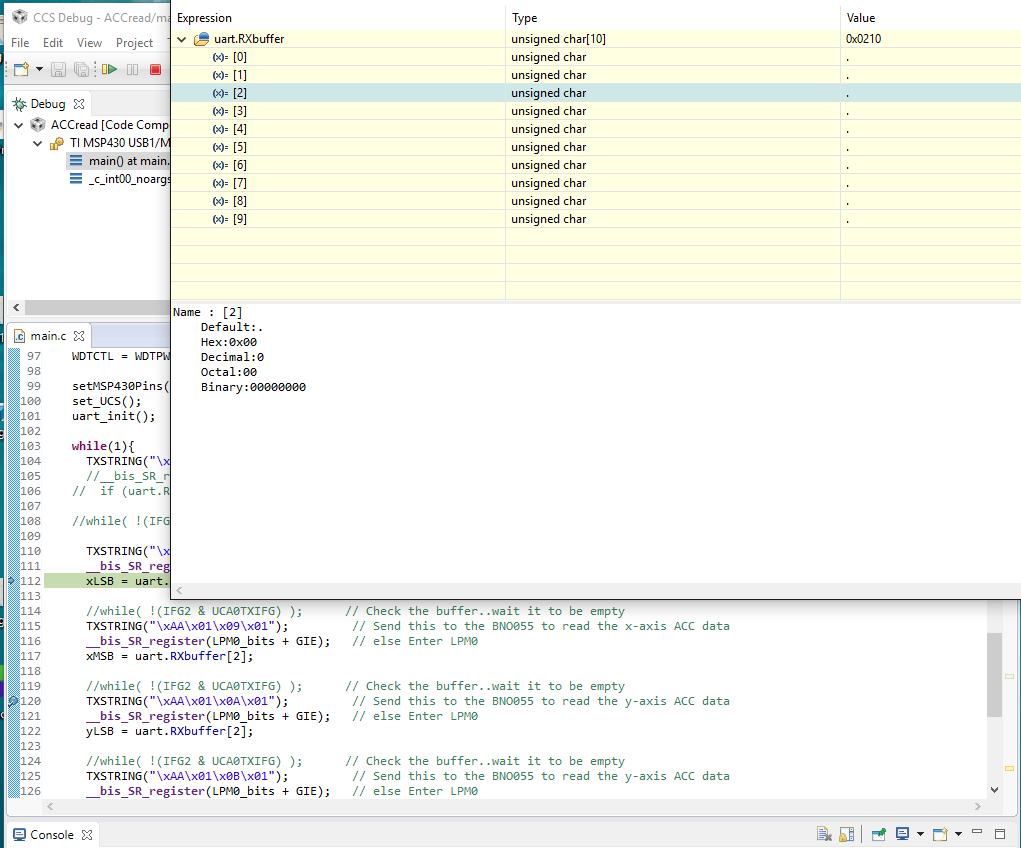
what does the uart.RXbuffer look like? Do you see any data filled in?
uart.RXbuffer has these:
uart.RXbuffer[0]: 0xBB.....which is correct, since the response of the BNO starts with BB
uart.RXbuffer[1]: 0x01...also correct as this indicates the length
uart.RXbuffer[2] to uart.RXbuffer[9]: 0x00...here is the problem
Ok, I commented all the
while( !(IFG2 & UCA0TXIFG) );
and use the debugger to check the RXbuffer (step by step, i.e. after sending the x-axis read command, etc) and there is no change, I am still getting BB 01 00
Oh sorry, that is what I mean by step by step, I placed a BP and checked, I got BB 01 00
But BB means the BNO has been red correctly and 01 means there is data of 1 byte coming
I am still working on getting the correct data rather than 00. So do you think that I must check that the receive has been completed, read RXbuffer[2] before doing another TX?
As receiving data can be any length, in your case it maybe always just 1 byte od data but you still
Make the RX ISR read the second byte and is should not wake up main until it got all bytes.
If main never wakes up you are waiting for one byte to much, subtract and 1 and try again. use a new RXbuflen as the cut off point to bic_SR
if (uart.bufRXpnt == uart.RXbuffer+2 && uart.RXbuffer[0] == 0xBB)
uart.RXbuflen = uart.RXbuffer[1];
if (!--uart.rxbuflen) // got all bytes in yet?
__bic_SR_register_on_exit(LPM0_bits); // wakeup main
Ok Tony, SO i figured out how to read multiple registers in one shot. So I use this: \xAA\x01\x08\x06, which means that it will read 6 registers starting from 0x08 and this what I want. As such my code turned as below. I am checking if I gor 18 bytes, because I understand that the response will be like this 0xBB 0x01 data(1-byte) this is repeated for 6 times. I am I correct?
When doing this, I got 0xBB 0x06(indicating that 6 bytes of data are coming) and the rest are 0x00! Please note this 6 not 18. So what does that mean? is that mean that the data re only counted (BB and 01 before the data are excluded)
And about these lines, How to make use of them in the new code? would you please do me a favor and insert them
Many thanks:
if (uart.bufRXpnt == uart.RXbuffer+2 && uart.RXbuffer[0] == 0xBB)
uart.RXbuflen = uart.RXbuffer[1];
if (!--uart.rxbuflen) // got all bytes in yet?
__bic_SR_register_on_exit(LPM0_bits); // wakeup main
Set uart.RXbuflen to 2 in TXdata subroutine
#include "msp430g2553.h"
char xLSB;
char xMSB;
char yLSB;
char yMSB;
char zLSB;
char zMSB;
typedef struct uartTag // UART
{ char *bufTXpnt; // UART TX buffer pointer
unsigned int buflen; // the lenght of block
char *bufRXpnt; // UART RX buffer pointer
char TXbuffer[20];
char RXbuffer[20];
} uartstruct;
void setMSP430Pins() {
//---------------- Configuring the LED's ----------------------//
P1DIR |= BIT0 + BIT6; // P1.0 and P1.6 output
P1OUT &= ~BIT0 + BIT6; // P1.0 and P1.6 = 0
//--------- Setting the UART function for P1.1 & P1.2 --------//
P1SEL |= BIT1 + BIT2; // P1.1 UCA0RXD input
P1SEL2 |= BIT1 + BIT2; // P1.2 UCA0TXD output
return;
}
void set_UCS() {
//------------------- Configure the Clocks -------------------//
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_12MHZ; // Set range
DCOCTL = CALDCO_12MHZ; // Set DCO step + modulation
}
void uart_init(void){
IE2 &= ~(UCA0TXIE | UCA0RXIE | UCB0TXIE | UCB0RXIE); // Disable all USCIx0 TX & RX interrupts
UCA0CTL1 = UCSWRST; // Set UCSWRST (hold USCI in Reset state)
UCA0CTL1 |= UCSSEL_3; // CLK = SMCLK
//------------ Configuring the UART(USCI_A0) ----------------//
// 115200 BAUD, CLK=12MHz
UCA0BR0 = 6; //this is working
UCA0BR1 = 0; //this is working
//*ours: UCBRF = 8, UCBRS = 0, UCOS16 = 1
// UCBRF = 11, UCBRS = 0, UCOS16 = 1
// BITS| 7 6 5 4 | 3 2 1 | 0 |
// UCAxMCTL = | UCBRFx | UCBRSx | UCOS16 |
UCA0MCTL = 0x81; //this works fine
UCA0CTL1 &= ~UCSWRST; // Clear UCSWRST to enable USCI_A0-UART
IFG2 |= UCA0TXIFG; // preset IFG flag always left on
}
#define TXSTRING(pnt) (TXdata((pnt), sizeof(pnt)-1)) // cool macro to get string and string len
uartstruct uart; // declare a struct from typedef uartstruct
void TXdata( char* pnt, unsigned int len){
uart.bufTXpnt = pnt;
uart.buflen = len;
uart.bufRXpnt = uart.RXbuffer; // reset it to beginning of ram buffer
IE2 |= UCA0TXIE + UCA0RXIE; // enable USCI_A0 TX interrupt
}
//¦----------------------------- US0TX ISR ---------------------------------------¦
#pragma vector=USCIAB0TX_VECTOR
__interrupt void USCIAB0TX(void) // Shared A0/B0 TX IRQ vector
{
if (IFG2 & UCA0TXIFG){ // our USCI_A0 transmit Interrupt?
if (uart.buflen){ // if not zero
UCA0TXBUF = *uart.bufTXpnt++;
--uart.buflen;
}
else IE2 &= ~UCA0TXIE; // suspend IE if zero
}
else IFG2 &= ~UCB0TXIFG; // clear a false UCB0 trigger
}
//¦----------------------------- US0RX ISR ---------------------------------------¦
#pragma vector=USCIAB0RX_VECTOR
__interrupt void USCIAB0RX(void) // Shared A0/B0 RX IRQ vector
{
if (IFG2 & UCA0RXIFG){ // our USCI_A0 Recive Interrupt?
*uart.bufRXpnt++ = UCA0RXBUF; // copy data byte
if (uart.bufRXpnt == uart.RXbuffer+18) // got 18 bytes in yet? <<<<
__bic_SR_register_on_exit(LPM0_bits); // wakeup main <<<<
}
else IFG2 &= ~UCB0RXIFG;
}
void main(void) {
WDTCTL = WDTPW + WDTHOLD; // Stop the Watch dog
setMSP430Pins();
set_UCS();
uart_init();
while(1){
TXSTRING("\xAA\x00\x3D\x01\x01"); // Send this to the BNO055 to set up the ACC mode (write)
TXSTRING("\xAA\x01\x08\x06"); // Send this to the BNO055 to read 6 registers, 2 for each axis
__bis_SR_register(LPM0_bits + GIE); // else Enter LPM0
xLSB = uart.RXbuffer[2];
xMSB = uart.RXbuffer[5];
yLSB = uart.RXbuffer[8];
yMSB = uart.RXbuffer[11];
zMSB = uart.RXbuffer[14];
zMSB = uart.RXbuffer[17];
__delay_cycles(12000); // small hard-loop delay
}
}
So the problem of getting 0s from the BNO055 is due to the fact that I am unable to set it to one of the sensing modes. When I set it to one of the sensing modes I get EE 03 which means, write failed. I would like to break up the write command, by sending one byte after another. May be this is the problem. I tried the following, but got EE 0A, which means ("> If a character arrives and the next character doesn’t arrive in the time frame of 100ms after that)!....is there a better way to do it?
Thank you
#include "msp430g2553.h"
char xLSB;
char xMSB;
char yLSB;
char yMSB;
char zLSB;
char zMSB;
typedef struct uart // UART
{ char *bufTXpnt; // UART TX buffer pointer
unsigned int TXbuflen; // the lenght of TX block
char *bufRXpnt; // UART RX buffer pointer
unsigned int RXbuflen; // the lenght of RX block
char TXbuffer[20];
char RXbuffer[20];
} uartstruct;
void setMSP430Pins() {
//--------- Setting the UART function for P1.1 & P1.2 --------//
P1SEL |= BIT1 + BIT2; // P1.1 UCA0RXD input
P1SEL2 |= BIT1 + BIT2; // P1.2 UCA0TXD output
return;
}
void set_UCS() {
//------------------- Configure the Clocks -------------------//
// DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_12MHZ; // Set range
DCOCTL = CALDCO_12MHZ; // Set DCO step + modulation
}
void uart_init(void){
IE2 &= ~(UCA0TXIE | UCA0RXIE | UCB0TXIE | UCB0RXIE); // Disable all USCIx0 TX & RX interrupts
// UCA0CTL1 = UCSWRST; // Set UCSWRST (hold USCI in Reset state)
// UCA0CTL1 |= UCSSEL_3; // CLK = SMCLK
UCA0CTL1|=UCSWRST; //today added
UCA0CTL1|= UCSSEL_2; //today added
//------------ Configuring the UART(USCI_A0) ----------------//
// 115200 BAUD, CLK=12MHz
UCA0BR0 = 6; //this is working
UCA0BR1 = 0; //this is working
//*ours: UCBRF = 8, UCBRS = 0, UCOS16 = 1
// UCBRF = 11, UCBRS = 0, UCOS16 = 1
// BITS| 7 6 5 4 | 3 2 1 | 0 |
// UCAxMCTL = | UCBRFx | UCBRSx | UCOS16 |
UCA0MCTL = 0x81; //this works fine
UCA0CTL1 &= ~UCSWRST; // Clear UCSWRST to enable USCI_A0-UART
IFG2 |= UCA0TXIFG; // preset IFG flag always left on
IE2|=UCA0RXIE; ///today added
}
#define TXSTRING(pnt) (TXdata((pnt), sizeof(pnt)-1)) // cool macro to get string and string len
uartstruct uart; // declare a struct from typedef uartstruct
void TXdata( char* pnt, unsigned int len){
uart.bufTXpnt = pnt;
uart.TXbuflen = len;
uart.bufRXpnt = uart.RXbuffer; // reset it to beginning of ram buffer
IE2 |= UCA0TXIE + UCA0RXIE; // enable USCI_A0 TX & RX interrupt
}
//¦----------------------------- Delay Function ---------------------------------------¦
// This function will give us 1ms wait time, so for getting 10 ms,
// then delay_ms(10) will give 10ms and delay_ms(100) will give 100ms
void delay_ms(unsigned int ms)
{
unsigned int i;
for (i = 0; i<= ms; i++)
__delay_cycles(6000); // 6000 will give us 1ms
}
//void delay_ms(int del) //generates delay in milliseconds
//{
// del = (SysCtlClockGet()/3.0)*del/1000.0;
// SysCtlDelay(del);
//}
//¦----------------------------- US0TX ISR ---------------------------------------¦
#pragma vector=USCIAB0TX_VECTOR
__interrupt void USCIAB0TX(void) // Shared A0/B0 TX IRQ vector
{
if (IFG2 & UCA0TXIFG){ // our USCI_A0 transmit Interrupt?
if (uart.TXbuflen){ // if not zero
UCA0TXBUF = *uart.bufTXpnt++;
--uart.TXbuflen;
}
else IE2 &= ~UCA0TXIE; // suspend IE if zero
}
else IFG2 &= ~UCB0TXIFG; // clear a false UCB0 trigger
}
//¦----------------------------- US0RX ISR ---------------------------------------¦
#pragma vector=USCIAB0RX_VECTOR
__interrupt void USCIAB0RX(void) // Shared A0/B0 RX IRQ vector
{
if (IFG2 & UCA0RXIFG){ // our USCI_A0 Recive Interrupt?
*uart.bufRXpnt++ = UCA0RXBUF; // copy data byte
if (uart.bufRXpnt == uart.RXbuffer+8 && uart.RXbuffer[0]==0xBB) // got 8 bytes in yet? <<<<
uart.RXbuflen=uart.RXbuffer[1];
}
else IFG2 &= ~UCB0RXIFG;
}
//¦----------------------------- Main -------------------------------------------¦
void main(void) {
WDTCTL = WDTPW + WDTHOLD; // Stop the Watch dog
//uart.RXbuflen=8;
setMSP430Pins();
set_UCS();
uart_init();
while(1){
TXSTRING("\xAA\x00\x3D\x01\x00"); // Send this to the BNO055 to set up the config mode (write)
// while( !(IFG2 & UCA0TXIFG) ); // Check the buffer..wait it to be empty
delay_ms(10);
TXSTRING("\xAA\x00\x07\x01\x00"); // Page selection (page 0)
delay_ms(10);
TXSTRING("\xAA\x00\x3E\x01\x00"); // Normal Power mode
delay_ms(10);
// send the following to set the BNO to AMG mode (all sensors are on)
TXSTRING("\x01");
TXSTRING("\x3D");
TXSTRING("\x01");
TXSTRING("\x07");
// xLSB = uart.RXbuffer[2];
// xMSB = uart.RXbuffer[3];
// yLSB = uart.RXbuffer[4];
// yMSB = uart.RXbuffer[5];
// zMSB = uart.RXbuffer[6];
// zMSB = uart.RXbuffer[7];
// }
__bis_SR_register(LPM0_bits + GIE); // else Enter LPM0
// __delay_cycles(12000); // small hard-loop delay
}
}