Good Evening,
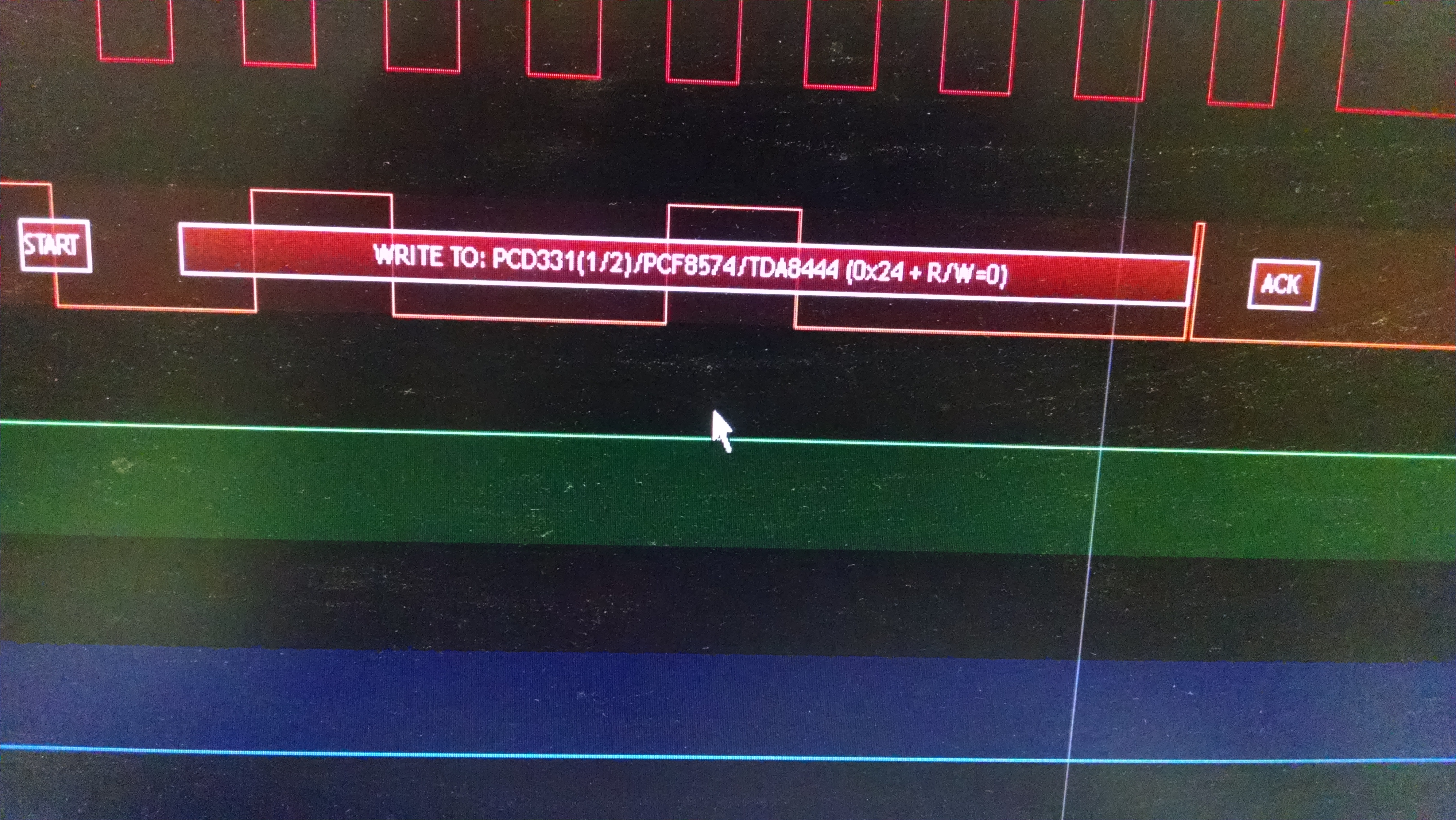
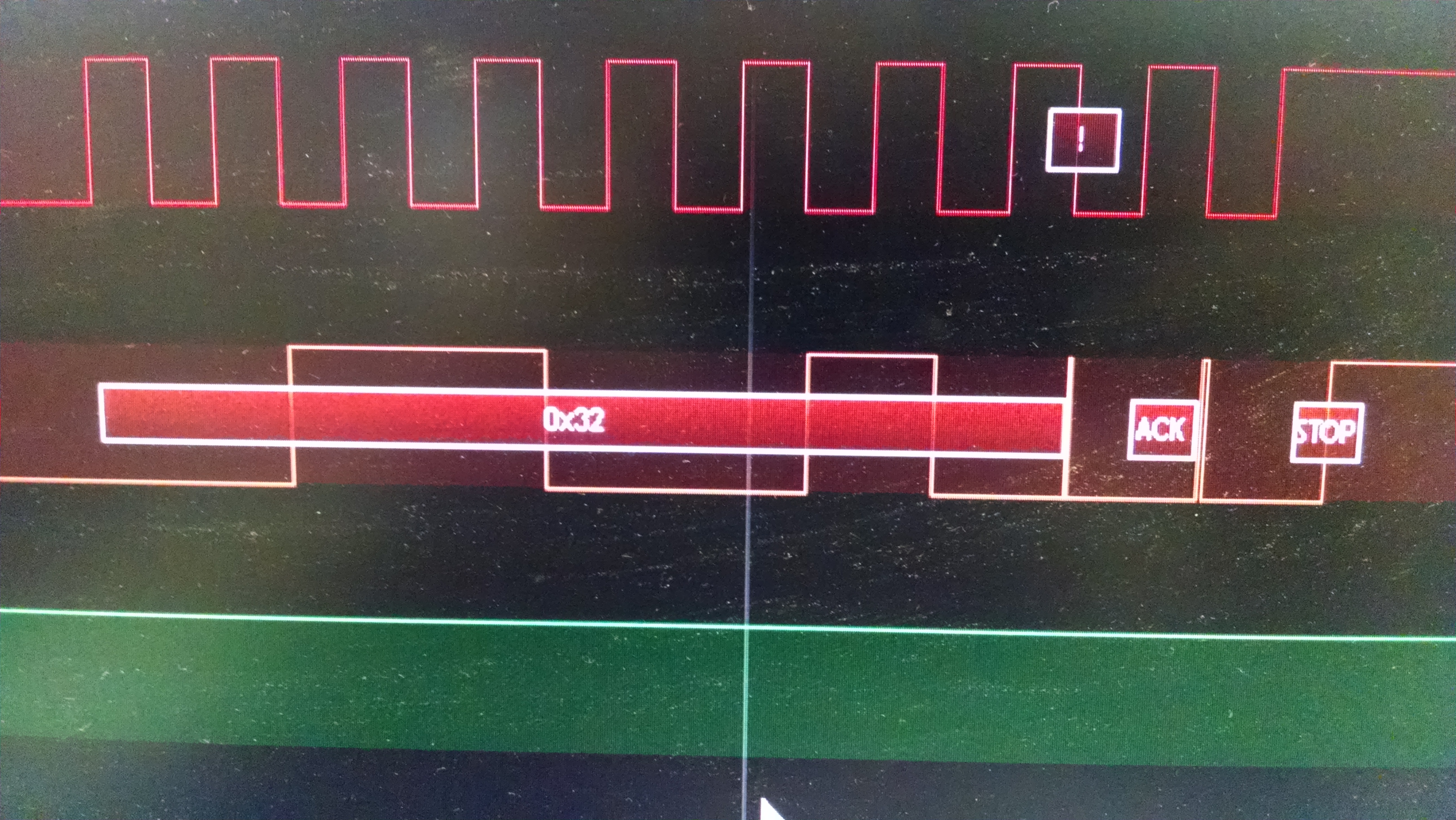
My task is to program and use a PN532 nfc development board with a msp430 micro controller via I2C. I have access to a logic level analyzer i use every day and the example code for reading and writing multiple bites hasn't panned out. I know all the data packs i need to send it and what it should return but when i send the first data pack it doesn't seem to ack back as well as im having a hard time setting up any example program to read incoming bites right after sending them. any help on sending a data pack and reading the result accurately perhaps off an example program will be very helpful. Thank you