
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
I am having trouble with the slave receive code for the G2553. I am using the Tiva C TM4C1294 as the master transmitter and I have proven to myself that it works because I do not have any problems with the master transmitter code with other slave receivers. However, with the G2553 as the slave receiver, I am only able to receive two random bytes of the message I am sending and then it stops receiving any of that message after receiving it one time. The master is sending the message every 150 ms and I have copied and pasted message I am sending below:
message1[0] = 7;
message1[1] = 244;
message1[2] = 16;
message1[3] = 232;
message1[4] = 48;
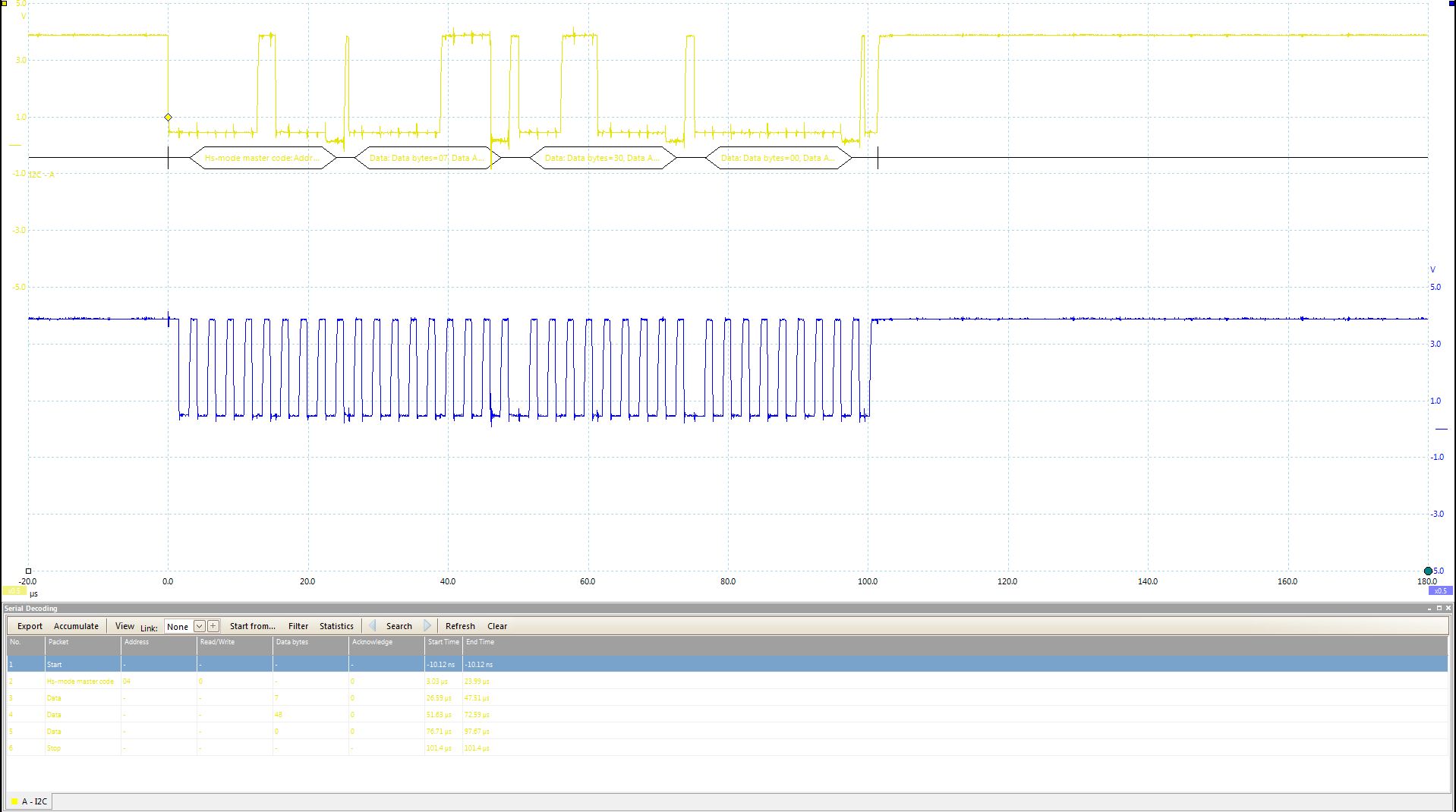
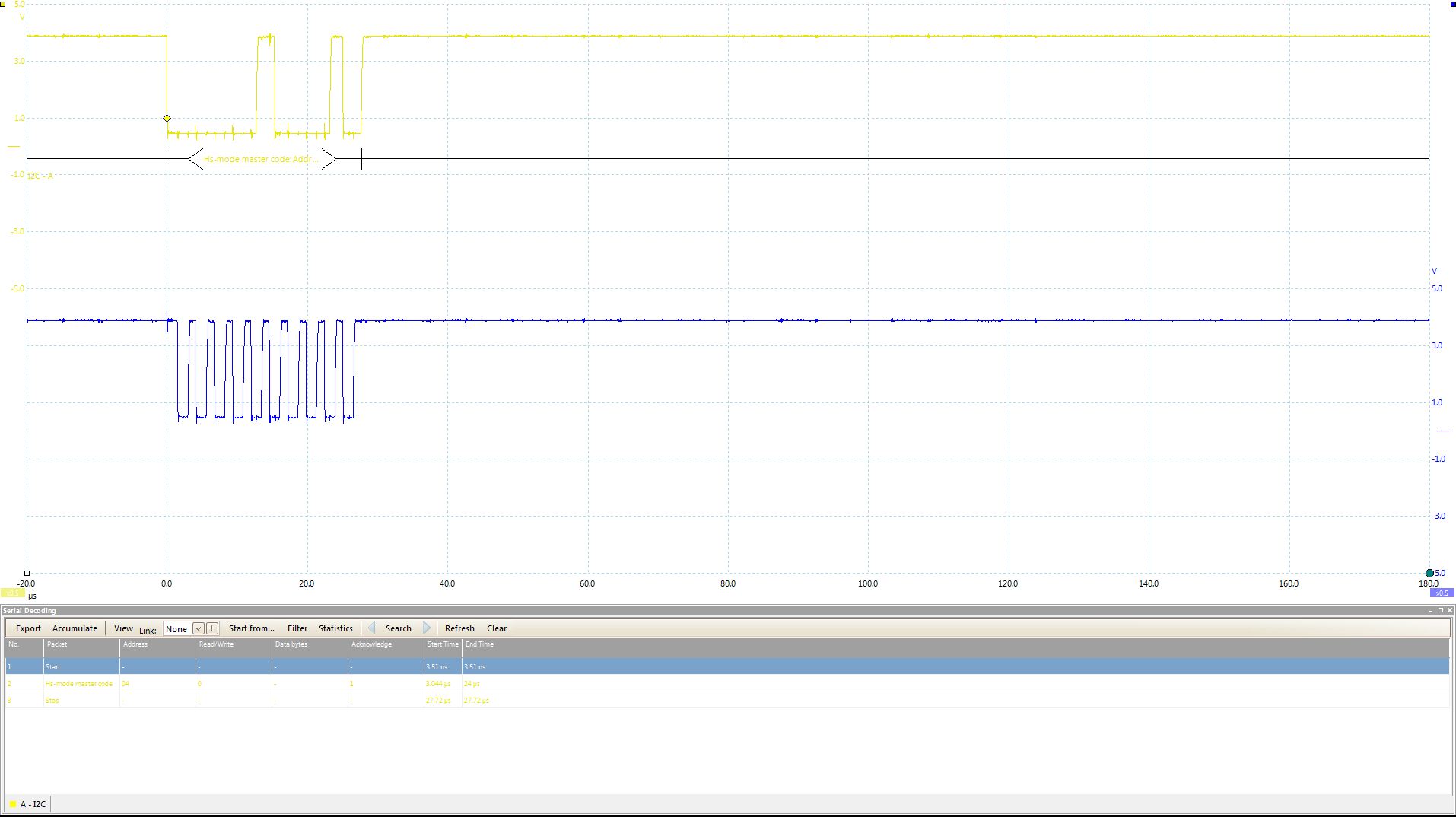
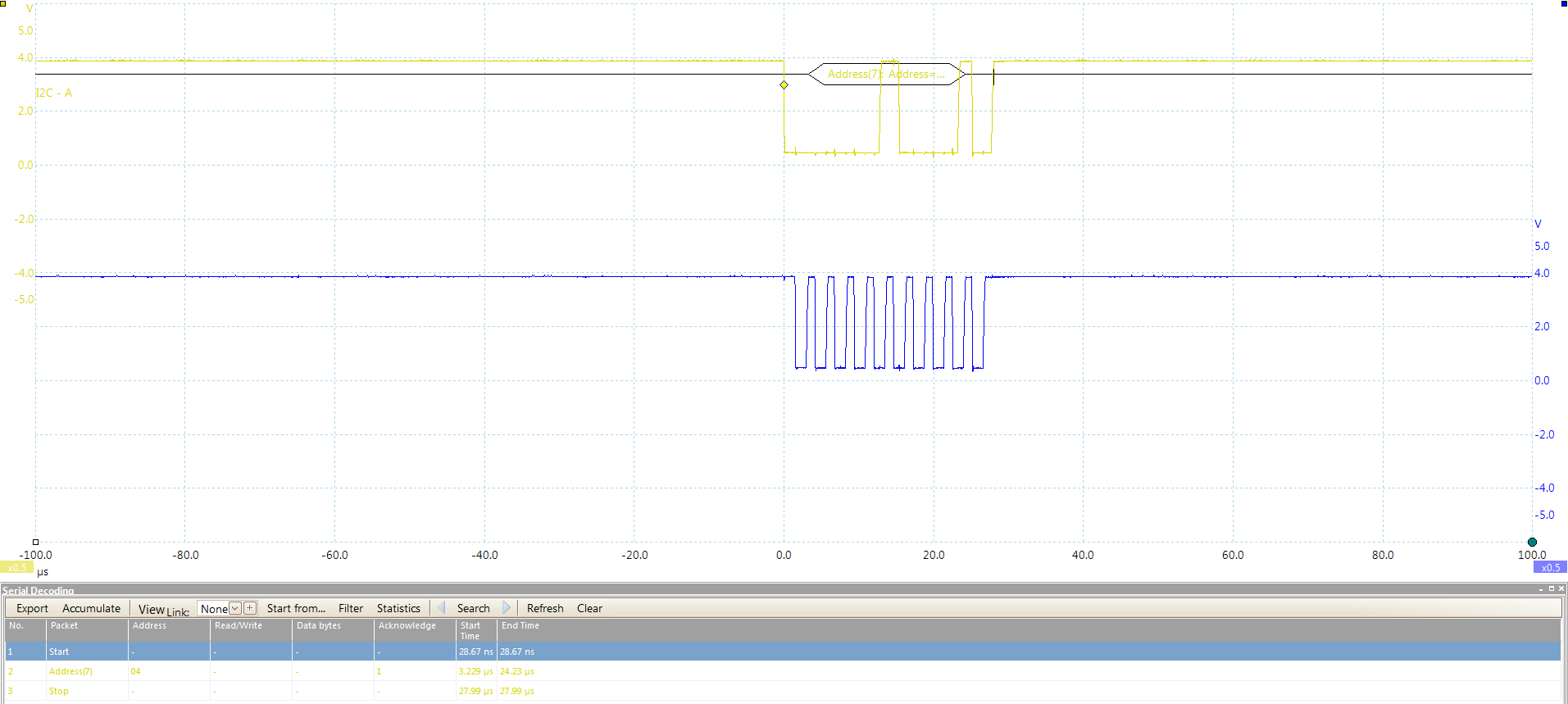
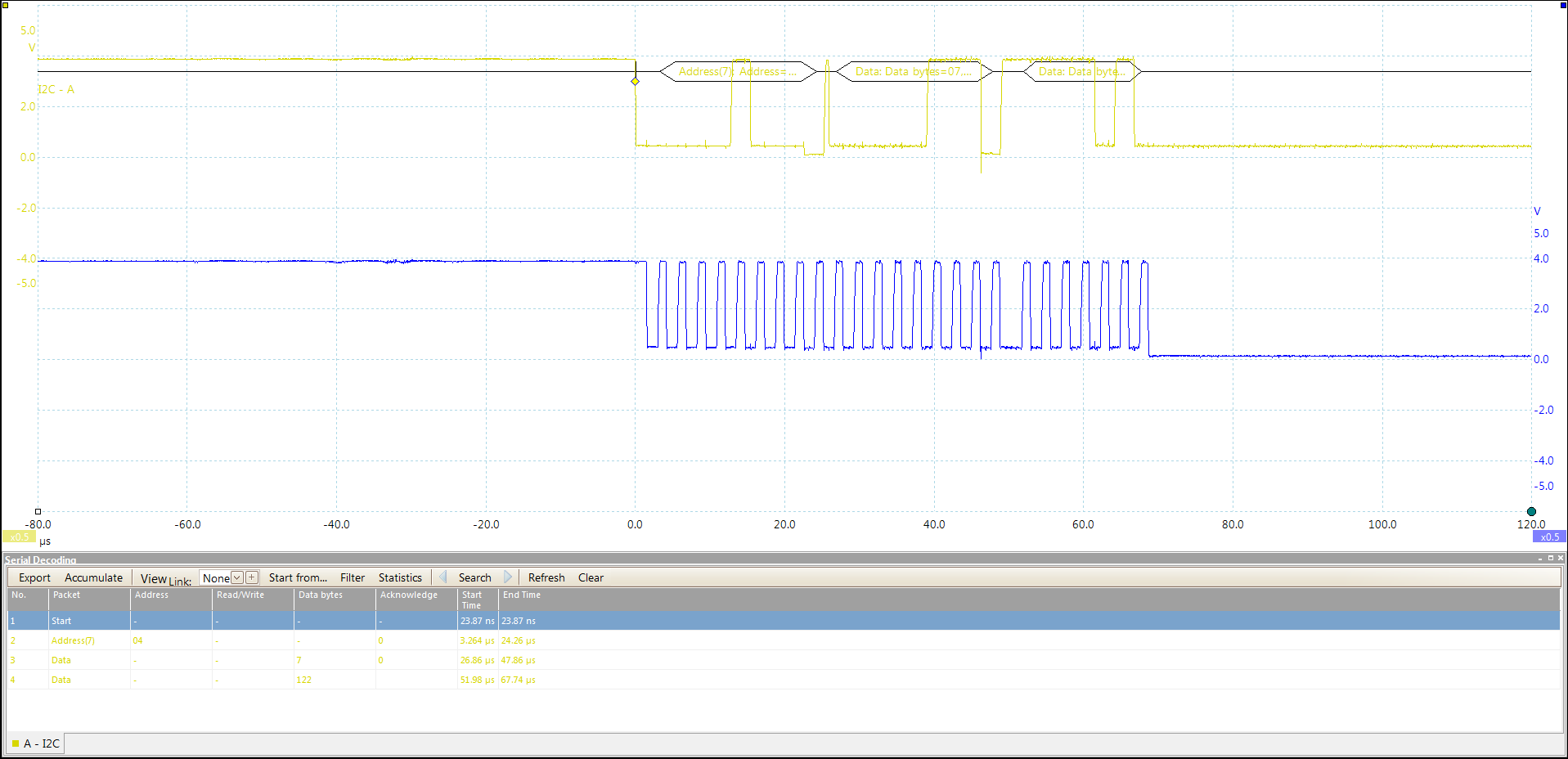
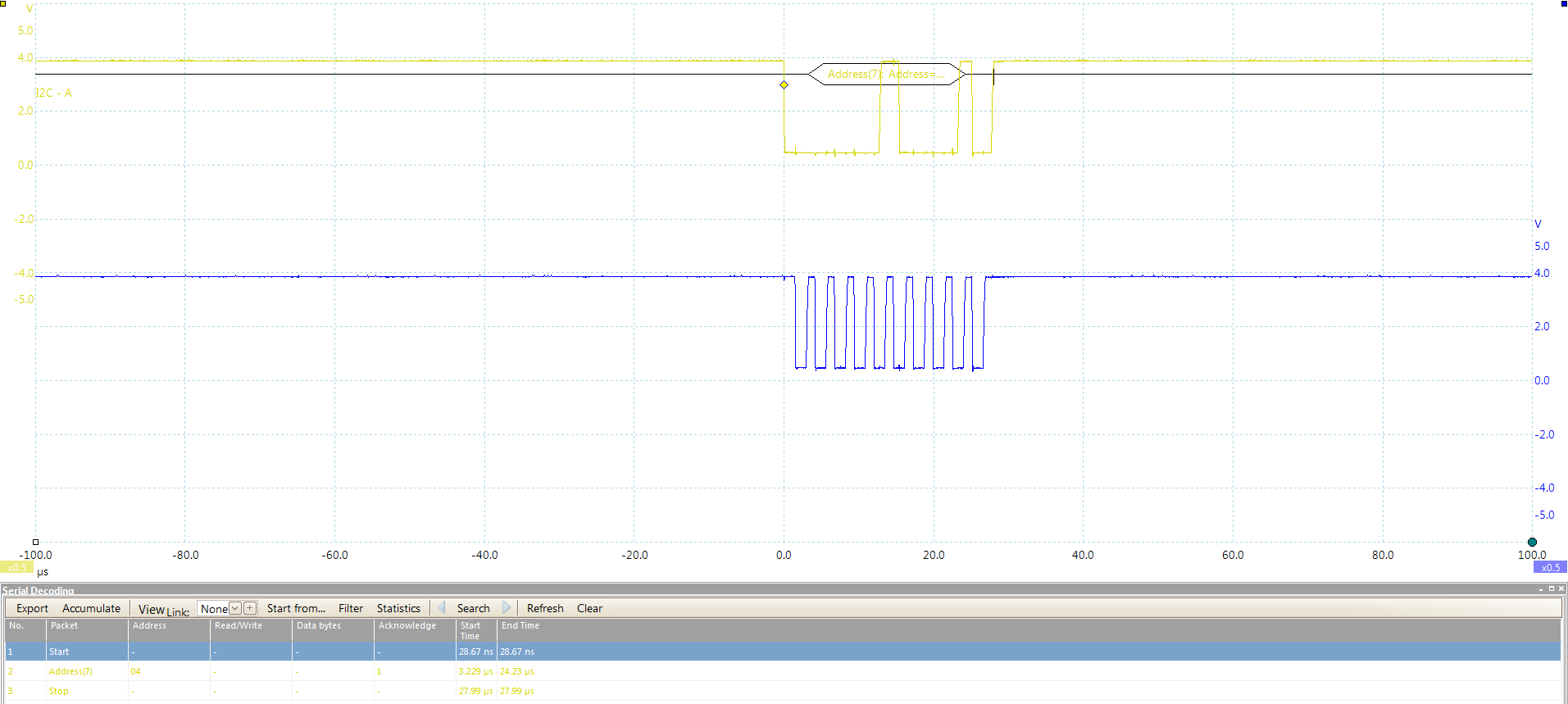
I have attached my slave receive code below and some screen shots of what it receives.
Receives two random bytes of the message sent
Stops receiving any part of the message
**Attention** This is a public forum







{kind=link}