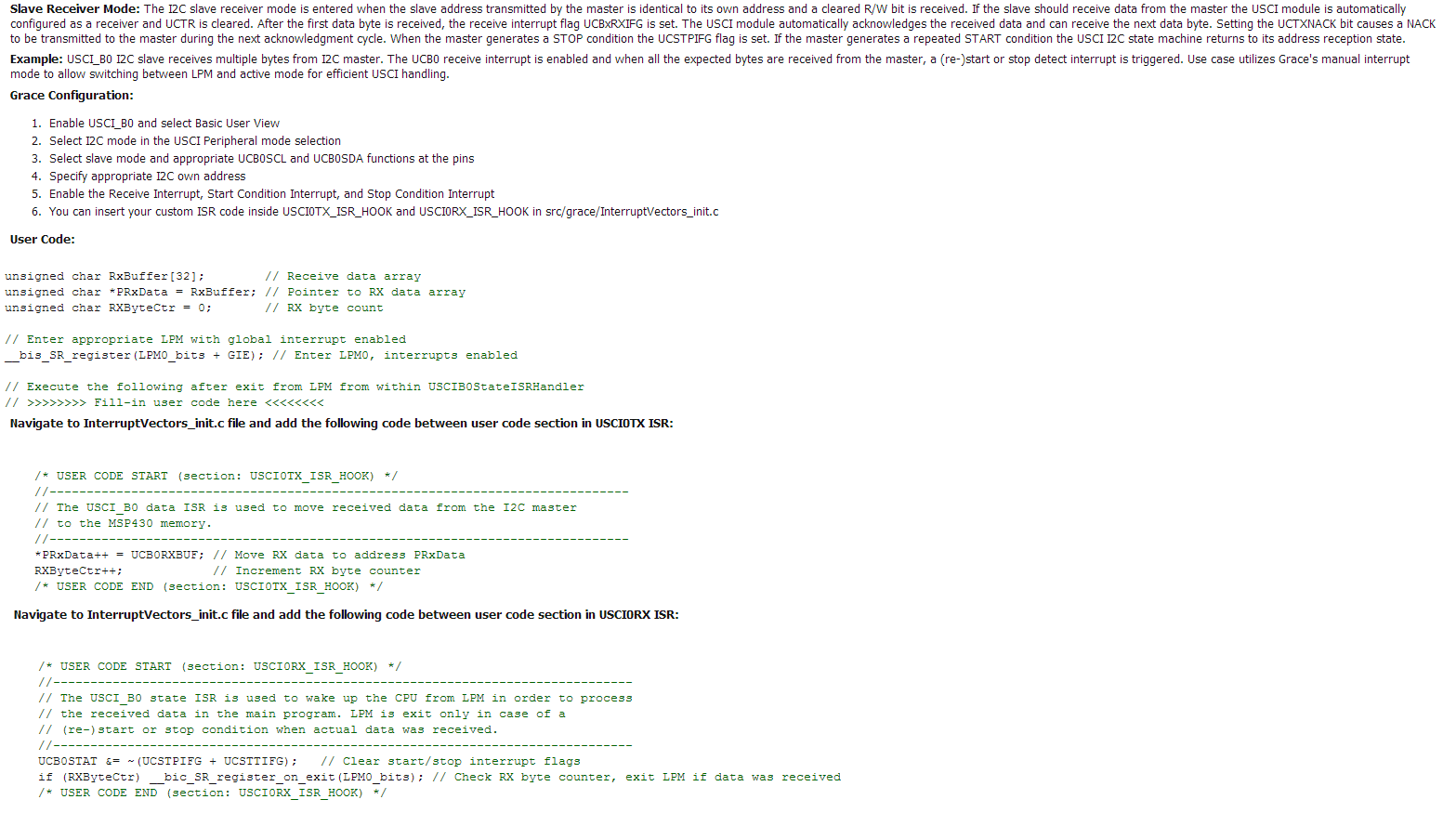
Thank you for your help with setting up I2C. I am now trying to send data over the I2C bus to the MSP430 from a Tiva C series board in order to change the frequency, duty cycle, channel, and clock divide of two different Timer modules. Below, I have attached the protocol for how the data is organized and parsed when sending the data.

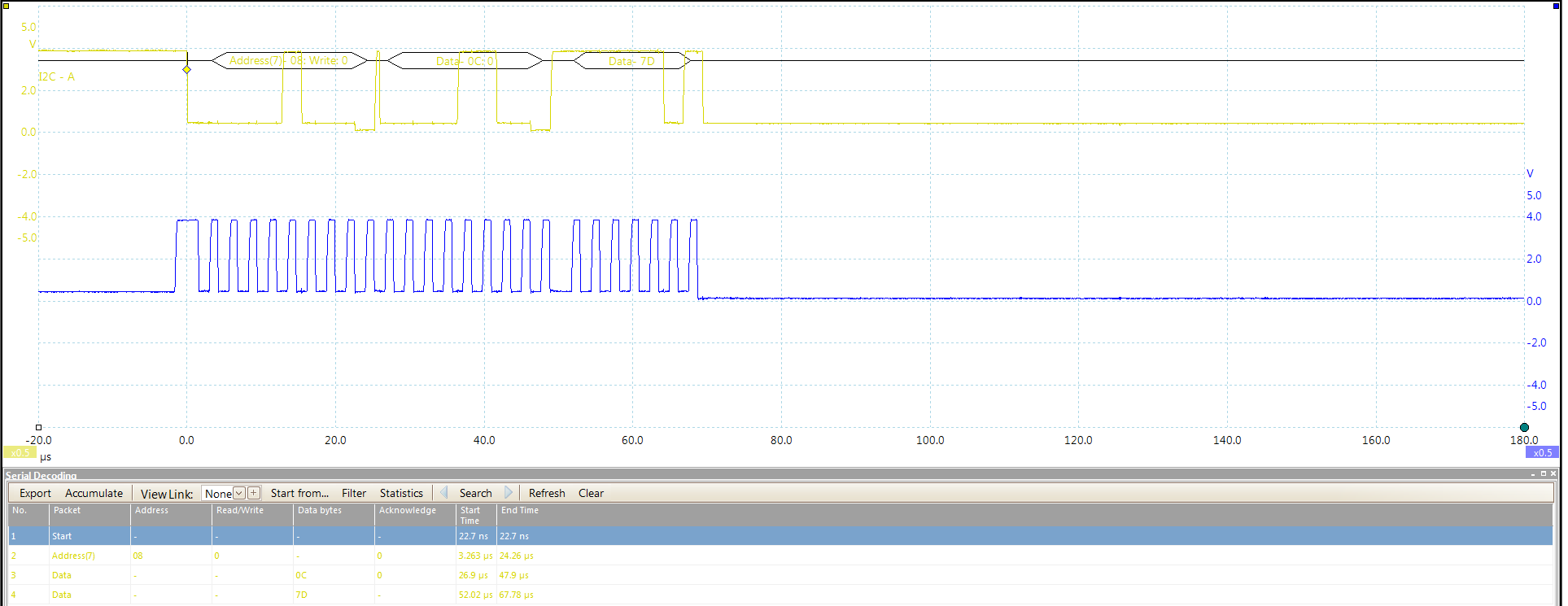
As shown above, if the channel bit is cleared then the PWM signal from pin P1.2 will be changed and if the channel bit is set then the PWM signal from pin P2.2 will be changed. Furthermore, the periodHigh bytes and period bytes are sent as clock ticks. I have copied and pasted a sample message below and explained what is being sent.
message1[0] = 0x0C;
// Clock divide = ID_3 -> 4 MHz / 8 = 500 kHz,
// Channel = 0: -> P1.2 PWM
message1[1] = 0xFA;
message1[2] = 0x00;
// periodHigh = 250 clock ticks -> 50% Duty Cycle b/c it's 50% of the period's clock ticks
message1[3] = 0xF4;
message1[4] = 0x01;
// period = 500 clock ticks -> 500 kHz / 500 clock ticks = 1 kHz
So since I have explained how I have set everything up, I will now explain what problem I am having. The PWMs work by them selves but as soon as I start sending data over the I2C bus, the PWM modules die and no longer generate a PWM on either one of the pins. Do you know why this is? I have attached my code below.