Other Parts Discussed in Thread: MSP430F5132, ADS7946, MSP430FR5969
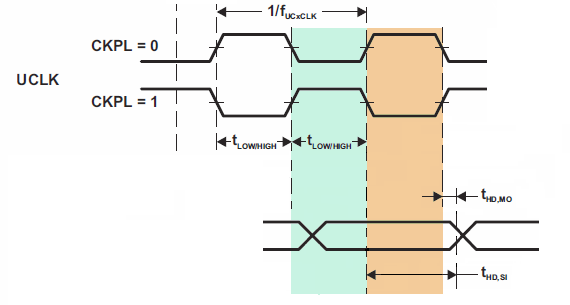
I am planning to use MSP430F5132 in SPI slave mode. What are the specifications for the clock? In the datasheet (SLAS619M, pages 33-34), low and high times are marked as t low/high and period is marked as 1/f UCXCLK, but I can't find any values for these parameters. I would like to use a 25 MHz clock. If it is possible to step up the clock to 40 MHz, it would be nice. I will not use SOMI data at all - it will not be connected.