


Other Parts Discussed in Thread: MSP430G2553
Hi, I am using msp430g2553 with launchpad, editing with CCS. My problem is Baudrate. In the userguide:
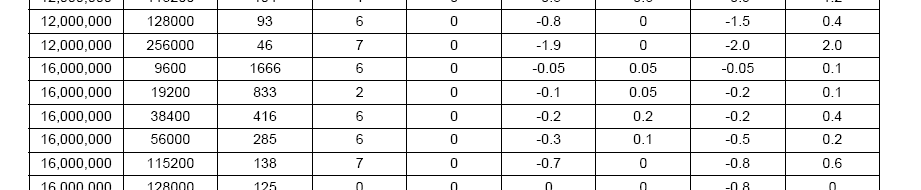
it says UCBRx should be 1666 with UCBRSx 6 set for baudrate 9600. So it tells me that I should set
UCA0BR0 = 0x82;
UCA0BR1 = 0x06;
UCA0MCTL = UCBRS_6;
however, when I do that, and oscillate with TXBUF= OxFF it oscillate at 953 Hz. (FF + 1 bit stop bit makes an oscillation at byte level) So baudrate is like 953x8=7624Hz. NOT 9600 Hz. So I can not communicate with Putty on my computer on 9600 Baudrate. However, I can communicate with my PC with uart using this code below:
#include <msp430g2553.h>
#include <string.h>
#include <stdio.h>
/*
* main.c
*/
void uart_conf(void);
void clck_conf(void);
char byte_to_crc[20];
unsigned short crc;
unsigned int len;
unsigned int pos;
unsigned int i;
unsigned int request_indicator=0;
char received_frame[20];
char transmitted_frame[20];
unsigned int byte_count_to_receive;
unsigned int byte_count_to_transmit;
unsigned int received_byte_counter;
unsigned int transmitted_byte_counter;
char reg_add_hi;
char reg_add_lo;
char nop_hi;
char nop_lo;
char crc_hi;
char crc_lo;
unsigned short mod_rtu_crc(char*, int); // generate crc
void read_holding_regs(char, char , unsigned short , unsigned short); // reading holding regs function
void main(void) {
WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
clck_conf();
uart_conf();
read_holding_regs(0x00, 0x03, 0x0001, 0x0002);
//IFG2 &= ~UCA0RXIFG;
UC0IE |= UCA0TXIE | UCA0RXIE;
__bis_SR_register(CPUOFF + GIE); // Enter LPM0 w/ int until Byte RXed
while(1);
}
void uart_conf(void){
UCA0CTL1 |= UCSWRST; //Reset USCI
UCA0CTL0 &= ~UCSYNC; // Clear UCSYNC for UART communication;
P1SEL |= (BIT1 | BIT2); // Select for spec. function directions UART TX and RX
P1SEL2 |= (BIT1 | BIT2);
UCA0CTL1 |= UCSSEL_2; // BTCL = SMCLK
UCA0BR0 = 0xFF;
UCA0BR1 = 0x05; // F_16MHZ / 1666 ~= 9600 KHz 0x0682 = 1666
UCA0MCTL = UCBRS_6; // Set modulation for minimum error rate (see spec...) 9600 Kps UCBRSx = 6 UcBRFx = 0;
UCA0CTL1 &= ~UCSWRST; // Un Reset USCI
//UC0IE |= (UCA0RXIE | UCA0TXIE); // enable interrupts
}
void clck_conf(void){
BCSCTL1 = CALBC1_16MHZ; // Set DCO 16 MHz
DCOCTL = CALDCO_16MHZ;
}
void read_holding_regs(char slave_add, char function, unsigned short reg_add, unsigned short nop){
byte_to_crc[0] = slave_add;
byte_to_crc[1] = function;
reg_add_hi = reg_add >> 8;
reg_add_lo = reg_add & 0x00ff;
byte_to_crc[2] = reg_add_hi;
byte_to_crc[3] = reg_add_lo;
nop_hi = nop >> 8;
nop_lo = nop & 0x00ff;
byte_to_crc[4] = nop_hi;
byte_to_crc[5] = nop_lo;
len = 6;
mod_rtu_crc(byte_to_crc, len);
crc_hi = crc >> 8;
crc_lo = crc & 0x00ff;
transmitted_frame[0] = byte_to_crc[0];
transmitted_frame[1] = byte_to_crc[1];
transmitted_frame[2] = byte_to_crc[2];
transmitted_frame[3] = byte_to_crc[3];
transmitted_frame[4] = byte_to_crc[4];
transmitted_frame[5] = byte_to_crc[5];
transmitted_frame[6] = crc_lo;
transmitted_frame[7] = crc_hi;
received_byte_counter = 0;
byte_count_to_receive = len + (int)nop + 2; // + 2 for CRC and + No of Points because 2x nop comes back as response
byte_count_to_transmit = len + 2;
// start serial transmit
__delay_cycles(64000); // Wait for 4 ms
}
// Compute the MODBUS RTU CRC
unsigned short mod_rtu_crc(char* bytes, int len)
{
crc = 0xFFFF;
for(pos = 0; pos < len; pos++){
crc ^= (unsigned short)bytes[pos]; // XOR byte into least sig. byte of crc
for(i = 8; i != 0; i--){ // Loop over each bit
if((crc & 0x0001) != 0){ // If the LSB is set
crc >>= 1; // Shift right and XOR 0xA001
crc ^= 0xA001;
}
else{ // Else LSB is not set
crc >>= 1; // Just shift right
}
}
// Note, this number has low and high bytes swapped, so use it accordingly (or swap bytes)
}
return crc;
}
#pragma vector=USCIAB0RX_VECTOR
__interrupt void USCI0RX_ISR(void)
{
if(received_byte_counter != byte_count_to_receive-1){ //if receive is not over
received_byte_counter++;
received_frame[received_byte_counter]= UCA0RXBUF;
}
else{
received_frame[received_byte_counter]= UCA0RXBUF;
UC0IE &= ~UCA0RXIE; // disable RX interrupts
}
}
#pragma vector=USCIAB0TX_VECTOR
__interrupt void USCI0TX_ISR(void)
{
if(transmitted_byte_counter != byte_count_to_transmit-1){ //if transmit is not over
transmitted_byte_counter++;
UCA0TXBUF = transmitted_frame[transmitted_byte_counter];
}
else{
UCA0TXBUF = transmitted_frame[transmitted_byte_counter];
UC0IE &= ~UCA0TXIE; // disable RX interrupts
//__delay_cycles(64000); // Wait for 4 ms
}
}
AS you see, I changed the values to
UCA0BR0 = 0xFF; UCA0BR1 = 0x05;
And I surprisingly can communicate?! Why is that, did I read the user guide wrong? I am open to any sggestion. Thanks.


