


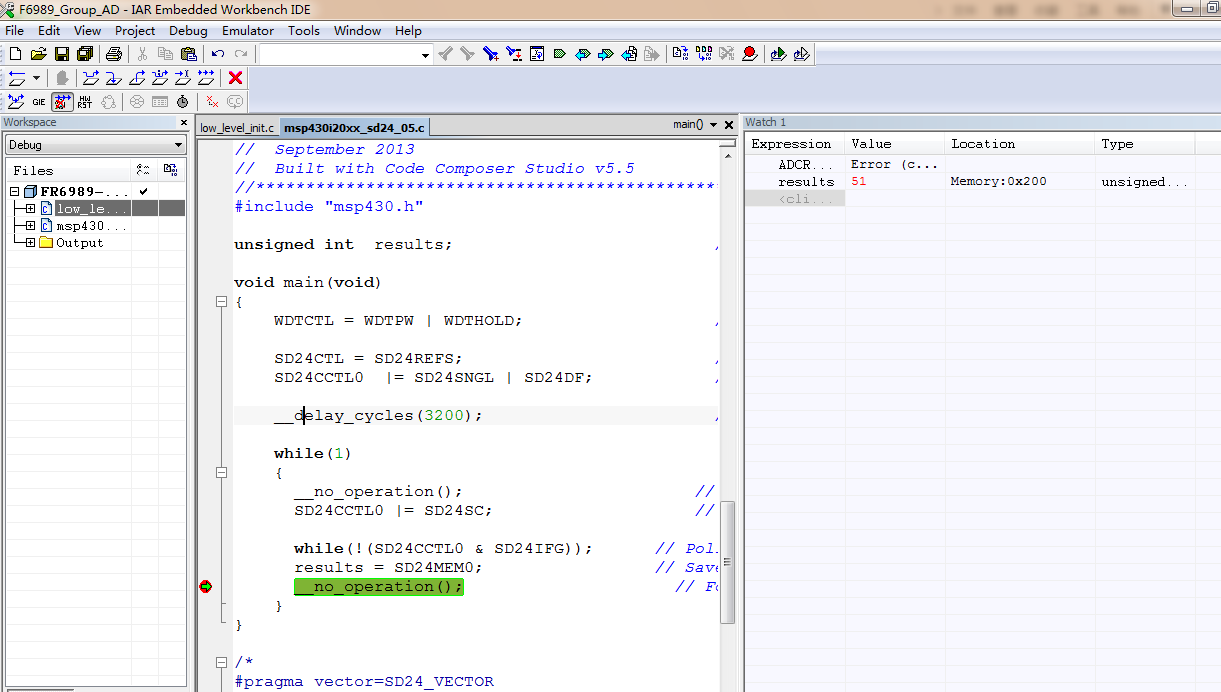

i used circuit above to test SD24 precision,but when tie A0.0+ to A0.0- ,there is a drift about 24/65536*1.16 = 0.4mv in my result, why this happens?
i used circuit above to test SD24 precision,but when tie A0.0+ to A0.0- ,there is a drift about 24/65536*1.16 = 0.4mv in my result, why this happens?
**Attention** This is a public forum
