


i tried to use Timer_D to implement two complimentary PWM with dead time control in high-res mode uisng F5132,but the pity is:

so i tried to use synchronized Timer0_D and Timer1_D with TDxCCR1 and TDxCCR2 combined,but the reslut is:
(1) the figure bellow is my code:

(2)when i used TimerD in normal mode(TDCLK = 16M),it peforms functionally as bellow

(3)when i used TimerD in high-res mode,it is not perform functionally(master is ok and slave not) just as bellow:
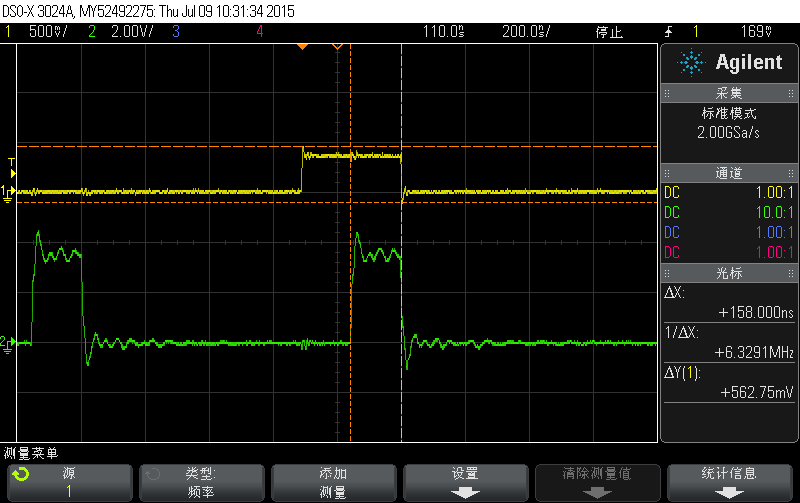
so i want ask TI employee, whether do this bug (synchronizing Timer0_D and Timer1_D with TDxCCR1 and TDxCCR2 combined do not perform functionally)exist???

