


Hello everyone, I'm working on a hobby project and would like some advice on some circuitry using an MSP430G2553.
The cruise control actuator and driver on my car don't work. However, the speed sensor, brake sensor, and control switches still work. My goal is to replace the actuator and driver. The actuator I replaced with a unit from a late model Lexus and the driver is my own design. If interested, you can read up on the project here: http://www.peachparts.com/shopforum/diesel-discussion/363769-cruise-control-project.html.
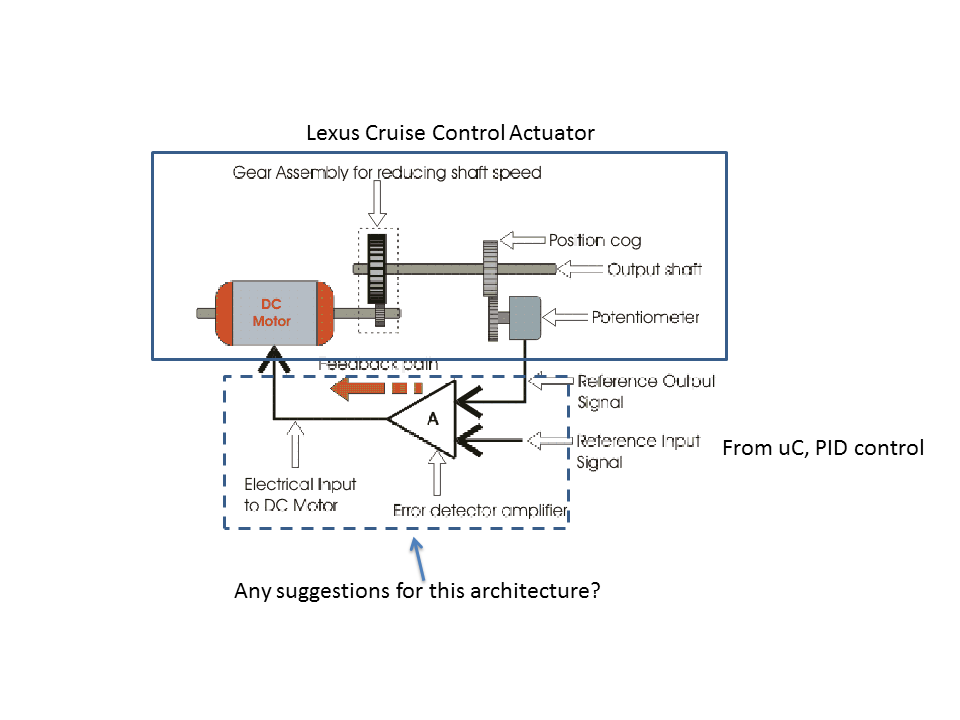
My question is about driving the control actuator. From what I can tell, it's a DC motor with a position feedback potentiometer. The pinout of the actuator is:
- Motor+
- Motor-
- FB Pot+
- FB Pot-
- FB Pot out
- Safety clutch +
- Safety clutch -
So far I've tried an H-bridge to control the new cruise control actuator from a Lexus. I got it kind of working - proportional control of the actuator arm using the feedback potentiometer built into the actuator. Due to ADC noise and mediocre signal integrity, the potentiometer reading fluctuates about 1%. Combined with overshoot from the motor, the controller and actuator oscillate unless I include hysteresis in the control algorithm. I haven't tried averaging the ADC outputs yet but that's in the works. Also, I had to include a massive proportional term because the motor won't move with PWM duty cycles below about 75%.
Can anyone think of a better way to control this without the hysteresis? Also, I stuffed the actuator control code into my debouncing ISR, so the sample period is about 5ms. Does this seem too high? I could move it to another timer and run it less often. The actuator isn't very fast, but does it matter much for proportional control?
Maybe an entirely analog solution would work better here? Any suggestions?
Thanks,
Ben




