Hello,
The interrupt vector handler definition for MSP430 can, according to the internet, be written as:
#pragma vector=TIMER0_A0_VECTOR
__interrupt void Timer0_A0(void)
{
//do something
}
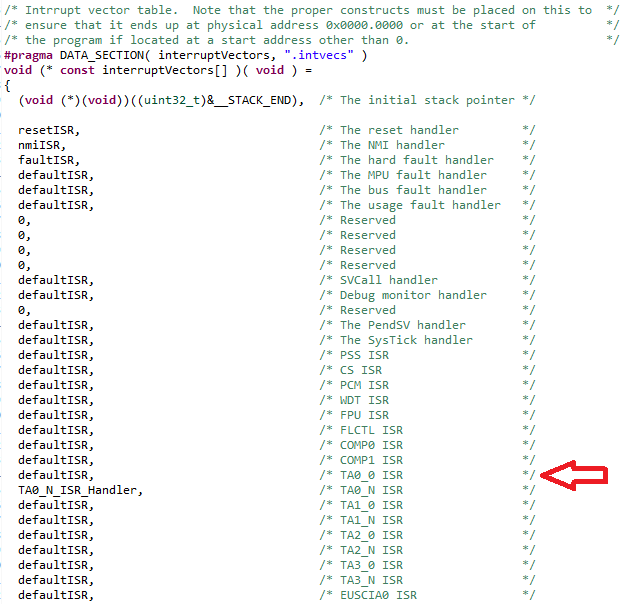
What would be an equivalent for MSP432? In msp432.h I've found some definitions for Timer Interrupt vectors in form of TAxIV, is this a replacement for TIMER_A0_VECTOR?
If I run the modified code (TAxIV instead of TIMER_A0_VECTOR), CCS 6.1, compiler version TI 5.2.5, reports a serious compiler problem (segmentation error), so this is clearly not the case.
I've also found some examples of interrupts for MSP432, which use __enable_interrupt(), but I can't piece it all together, because I can't find any examples which demonstrate the whole thing and I'm still kind of new to everything.
Thanks in advance!