



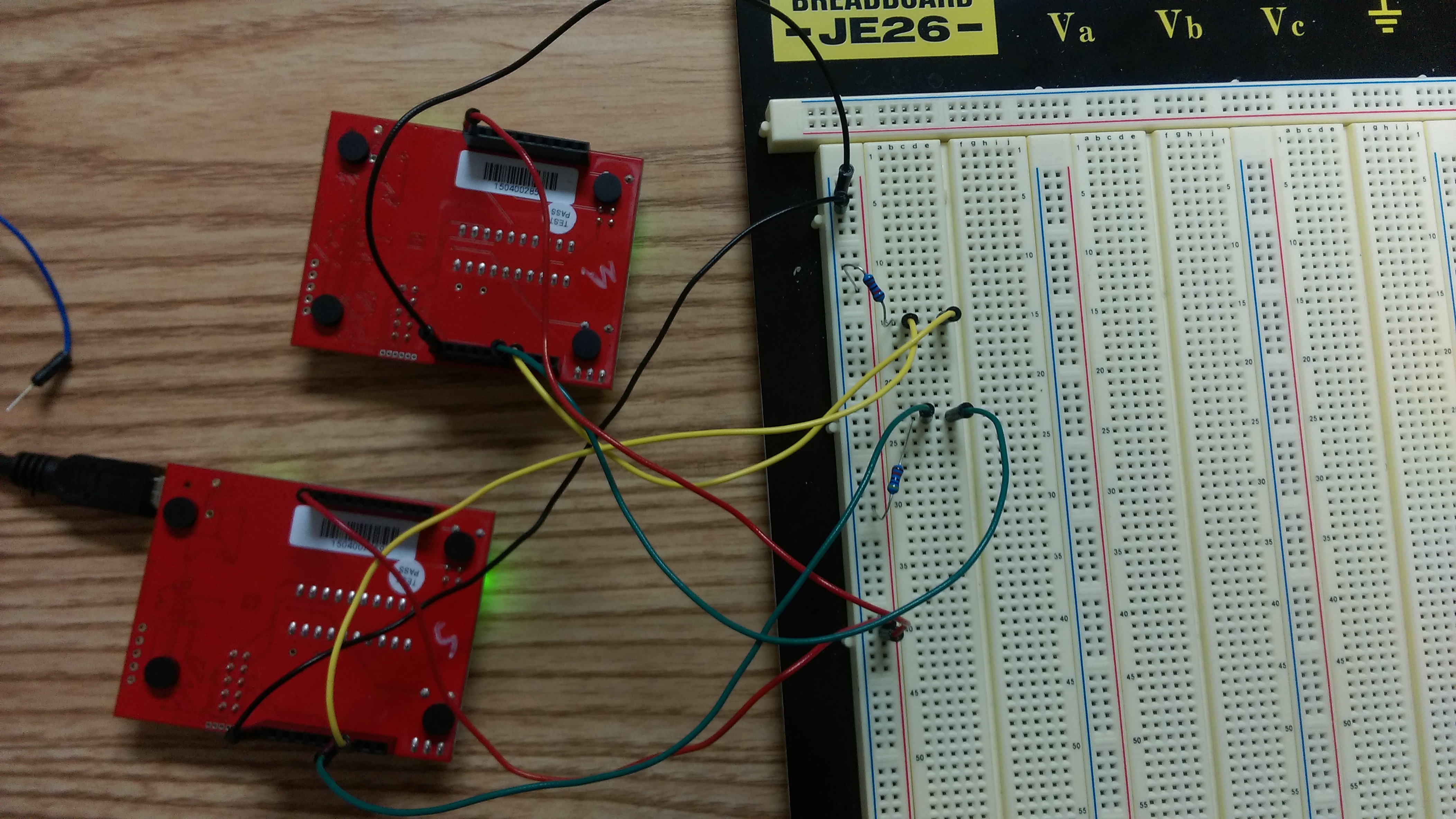

 I'm currently using the sample code below from TI. I have a master and a slave connected, SDA and SDL are each wired to their respective ports on the other MSP and I have one 12Kohm on each line pulling them up to Vcc. I'm using a breadboard, but I don't think its parasitic capacitance is a problem at 100KHz.
I'm currently using the sample code below from TI. I have a master and a slave connected, SDA and SDL are each wired to their respective ports on the other MSP and I have one 12Kohm on each line pulling them up to Vcc. I'm using a breadboard, but I don't think its parasitic capacitance is a problem at 100KHz.
I don't think I'm ever entering the Transmit interrupt vector for two reasons: a known-good oscilloscope is showing a constant high voltage on both signal pins, and when I put a break point in the Transmit interrupt vector, the system never stops there.
It's TI's code, so I would expect it to work straight out of the box. Am I being naive?
/* --COPYRIGHT--,BSD_EX
* Copyright (c) 2012, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*******************************************************************************
*
* MSP430 CODE EXAMPLE DISCLAIMER
*
* MSP430 code examples are self-contained low-level programs that typically
* demonstrate a single peripheral function or device feature in a highly
* concise manner. For this the code may rely on the device's power-on default
* register values and settings such as the clock configuration and care must
* be taken when combining code from several examples to avoid potential side
* effects. Also see www.ti.com/grace for a GUI- and www.ti.com/msp430ware
* for an API functional library-approach to peripheral configuration.
*
* --/COPYRIGHT--*/
//******************************************************************************
// MSP430G2xx3 Demo - USCI_B0 I2C Master RX multiple bytes from MSP430 Slave
//
// Description: This demo connects two MSP430's via the I2C bus. The slave
// transmits to the master. This is the master code. It continuously
// receives an array of data and demonstrates how to implement an I2C
// master receiver receiving multiple bytes using the USCI_B0 TX interrupt.
// ACLK = n/a, MCLK = SMCLK = BRCLK = default DCO = ~1.2MHz
//
// *** to be used with "msp430g2xx3_uscib0_i2c_11.c" ***
//
// /|\ /|\
// MSP430G2xx3 10k 10k MSP430G2xx3
// slave | | master
// ----------------- | | -----------------
// -|XIN P3.1/UCB0SDA|<-|---+->|P3.1/UCB0SDA XIN|-
// | | | | |
// -|XOUT | | | XOUT|-
// | P3.2/UCB0SCL|<-+----->|P3.2/UCB0SCL |
// | | | |
//
// D. Dang
// Texas Instruments Inc.
// February 2011
// Built with CCS Version 4.2.0 and IAR Embedded Workbench Version: 5.10
//******************************************************************************
#include <msp430.h>
unsigned char *PRxData; // Pointer to RX data
unsigned char RXByteCtr;
volatile unsigned char RxBuffer[128]; // Allocate 128 byte of RAM
int main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
P1SEL |= BIT6 + BIT7; // Assign I2C pins to USCI_B0
P1SEL2|= BIT6 + BIT7; // Assign I2C pins to USCI_B0
UCB0CTL1 |= UCSWRST; // Enable SW reset
UCB0CTL0 = UCMST + UCMODE_3 + UCSYNC; // I2C Master, synchronous mode
UCB0CTL1 = UCSSEL_2 + UCSWRST; // Use SMCLK, keep SW reset
UCB0BR0 = 12; // fSCL = SMCLK/12 = ~100kHz
UCB0BR1 = 0;
UCB0I2CSA = 0x48; // Slave Address is 048h
UCB0CTL1 &= ~UCSWRST; // Clear SW reset, resume operation
IE2 |= UCB0RXIE; // Enable RX interrupt
while (1)
{
PRxData = (unsigned char *)RxBuffer; // Start of RX buffer
RXByteCtr = 5; // Load RX byte counter
while (UCB0CTL1 & UCTXSTP); // Ensure stop condition got sent
UCB0CTL1 |= UCTXSTT; // I2C start condition
__bis_SR_register(CPUOFF + GIE); // Enter LPM0 w/ interrupts
// Remain in LPM0 until all data
// is RX'd
__no_operation(); // Set breakpoint >>here<< and
} // read out the RxBuffer buffer
}
//-------------------------------------------------------------------------------
// The USCI_B0 data ISR is used to move received data from the I2C slave
// to the MSP430 memory. It is structured such that it can be used to receive
// any 2+ number of bytes by pre-loading RXByteCtr with the byte count.
//-------------------------------------------------------------------------------
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector = USCIAB0TX_VECTOR
__interrupt void USCIAB0TX_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCIAB0TX_VECTOR))) USCIAB0TX_ISR (void)
#else
#error Compiler not supported!
#endif
{
RXByteCtr--; // Decrement RX byte counter
if (RXByteCtr)
{
*PRxData++ = UCB0RXBUF; // Move RX data to address PRxData
if (RXByteCtr == 1) // Only one byte left?
UCB0CTL1 |= UCTXSTP; // Generate I2C stop condition
}
else
{
*PRxData = UCB0RXBUF; // Move final RX data to PRxData
__bic_SR_register_on_exit(CPUOFF); // Exit LPM0
}
}


