


Hi,
I'm interfacing MSP430F5529 launchpad with ADS1248 via SPI. I was monitoring the UCB0TXBUF and RXBUF registers while running CCS and found that only TXBUF is getting the values and RXBUF always return 0x00 whenever a register is read. I first want to have a setup where I can write and read back registers properly. Upon seeing the waveforms of SPI on DSO, I found that the SCLK gets turned off whenever RXBUF is being used to read data. Please help in solving this issue. Please find the attachments of code and the waveforms below.
#include <msp430.h>
#include "ADS_settings.h"
void config_CLOCK(void); //8MHz
void CONFIG_SPI_ADS(void); //UCB0 as SPI
unsigned char REG_ADDR[15] = {MUX0,VBIAS,MUX1,SYS0,OFC0,OFC1,OFC2,FSC0,FSC1,FSC2,IDAC0,IDAC1,GPIOCFG,GPIOCDIR,GPIODAT};
unsigned char REG_VAL[15]= {MUX0_VAL,VBIAS_VAL,MUX1_VAL,SYS0_VAL,OFC0_VAL,OFC1_VAL,OFC2_VAL,FSC0_VAL,FSC1_VAL,FSC2_VAL,IDAC0_VAL,IDAC1_VAL,GPIOCFG_VAL,GPIOCDIR_VAL,GPIODAT_VAL};
unsigned char READ_REG[15]={0x00};
unsigned char read_data = 0;
unsigned char dummy = 0;
int main(void)
{
WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
config_CLOCK();
CONFIG_SPI_ADS();
//__bis_SR_register(GIE); //enable interrupts
__delay_cycles(10000);
P2OUT &= ~ BIT5; //RESET pin low - resets digital circuits
__delay_cycles(100000);
P2OUT |= BIT5; //RESET high
P2OUT |= BIT6; //CS high
P2OUT |= BIT4; //Make START pin as HIGH
while(1)
{
P2OUT &= ~BIT6; //Make CS low
while (!(UCB0IFG & UCTXIFG)); // Make sure nothing is already in the TX buffer
UCB0TXBUF = 0x40; // Send the write commmand with 0x00 as start address
while (!(UCB0IFG & UCRXIFG)); // Before returning wait until transmission is complete
dummy = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG)); // Make sure nothing is already in the TX buffer
UCB0TXBUF = 0x00; // Send the no. of registers to be written
while (!(UCB0IFG & UCRXIFG)); // Before returning wait until transmission is complete
dummy = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG)); // Make sure nothing is already in the TX buffer
UCB0TXBUF = 0x01; // Send the register value
while (!(UCB0IFG & UCRXIFG)); // Before returning wait until transmission is complete
dummy = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG)); // Make sure nothing is already in the TX buffer
UCB0TXBUF = 0x20; // Send the read register command
while (!(UCB0IFG & UCRXIFG)); // Before returning wait until transmission is complete
UCB0IFG &= ~(UCRXIFG);
dummy = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG)); // Make sure nothing is already in the TX buffer
UCB0TXBUF = 0x00; // Send the no.of registers to read
while (!(UCB0IFG & UCRXIFG)); // Before returning wait until transmission is complete
dummy = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG)); // Make sure nothing is already in the TX buffer
UCB0TXBUF = 0xFF; // Send dummy Byte to take data from register
while (!(UCB0IFG & UCRXIFG)); // Before returning wait until transmission is complete
read_data = UCB0RXBUF; //store the register value
P2OUT |= BIT6; //Make CS high
__delay_cycles(10000);
}
}
void config_CLOCK(void) //SMCLK CONFIGURAATION
{
volatile unsigned int i;
P1DIR |= BIT1; // P1.1 output
P1DIR |= BIT0; // ACLK set out to pins
P1SEL |= BIT0;
P2DIR |= BIT2; // SMCLK set out to pins
P2SEL |= BIT2;
P7DIR |= BIT7; // MCLK set out to pins
P7SEL |= BIT7;
UCSCTL3 = SELREF_2; // Set DCO FLL reference = REFO
UCSCTL4 |= SELA_2; // Set ACLK = REFO
UCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx
// Loop until XT1,XT2 & DCO stabilizes - In this case only DCO has to stabilize
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG);
// Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
__bis_SR_register(SCG0); // Disable the FLL control loop
UCSCTL1 = DCORSEL_5; // Select DCO range 16MHz operation
UCSCTL2 |= 15;
// (N + 1) * FLLRef = Fdco
__bic_SR_register(SCG0); // Enable the FLL control loop
// Worst-case settling time for the DCO when the DCO range bits have been
// changed is n x 32 x 32 x f_MCLK / f_FLL_reference. See UCS chapter in 5xx
// UG for optimization.
// 32 x 32 x 8 MHz / 32,768 Hz = 250000 = MCLK cycles for DCO to settle
__delay_cycles(250000);
}
void CONFIG_SPI_ADS(void) //SPI initialization
{
UCB0CTL1 |= UCSWRST; //set software reset to 1 so we can configure SPI
//UCB0STAT |= UCLISTEN; //the launchpad listens to itself (use for testing)
UCB0CTL0 |= UCCKPH+UCMSB + UCMST + UCSYNC; //clkphase,clkpolarity,MSBfirst,8-bit,master mode, 3-pin, synchronous SPI
UCB0CTL1 |= UCSSEL_2; //choose SMCLK as our clock. SMCLK is 1.1 MHz. We divise it with the baud register
UCB0BR0 |= 0x02; //Prescalar for the SCLK (2 bytes). Here it sets 8MHz sclk to 4MHz
UCB0BR1 = 0; //upper byte of br register. set to zero
__delay_cycles(10);
P1DIR &= ~BIT1; //DRDY - Input to MCU
P2DIR |= BIT4; //START - Output from MCU
P2DIR |= BIT5; //RESET - Output from MCU
P2DIR |= BIT6; //CS - Output from MCU
P3DIR |= BIT0+BIT2; //3.0-MOSI, 3.2-SCLK Output from MCU
P3DIR &= ~BIT1; //3.1 MISO Input to MCU
P3SEL |= (BIT0 | BIT1 | BIT2); //configures pins for three pin SPI. MISO P3.1, MOSI P3.0, SCLK P3.2
__delay_cycles(10);
UCB0CTL1 &= ~UCSWRST; //enables the SPI to work
UCB0IE |= UCTXIE+UCRXIE; // Enable USCI0 TX AND RX interrupt
}
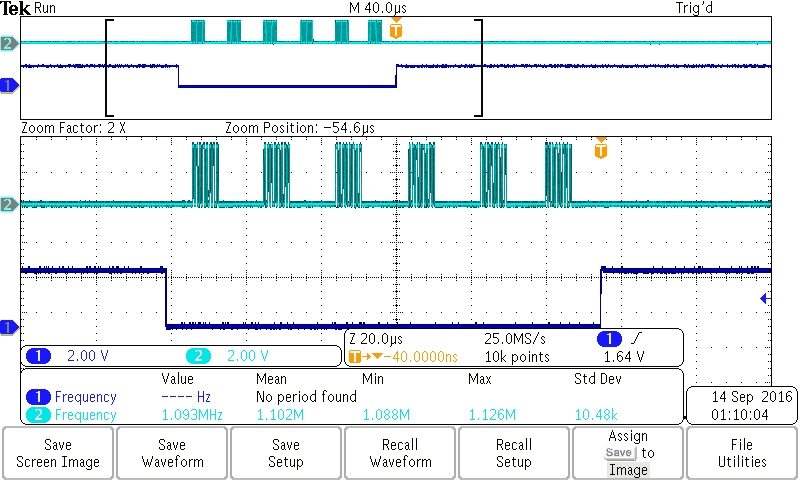
SCLK (2) - CS (1) SIGNALS:

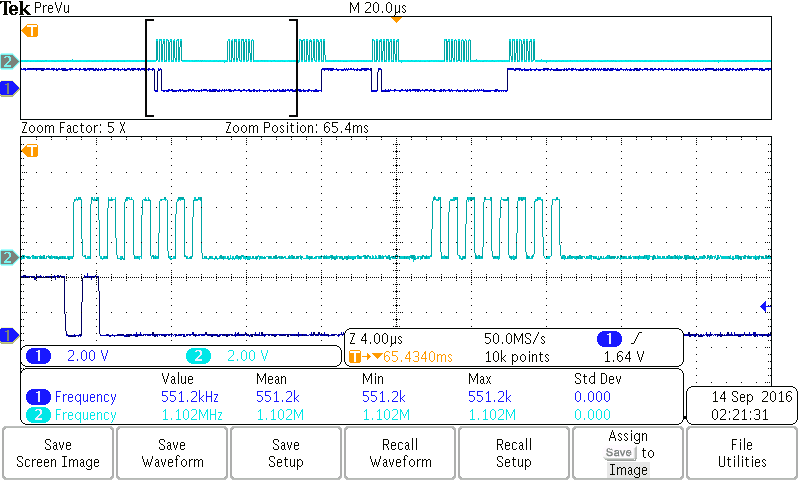
SCLK (2) - MOSI (1) SIGNALS:

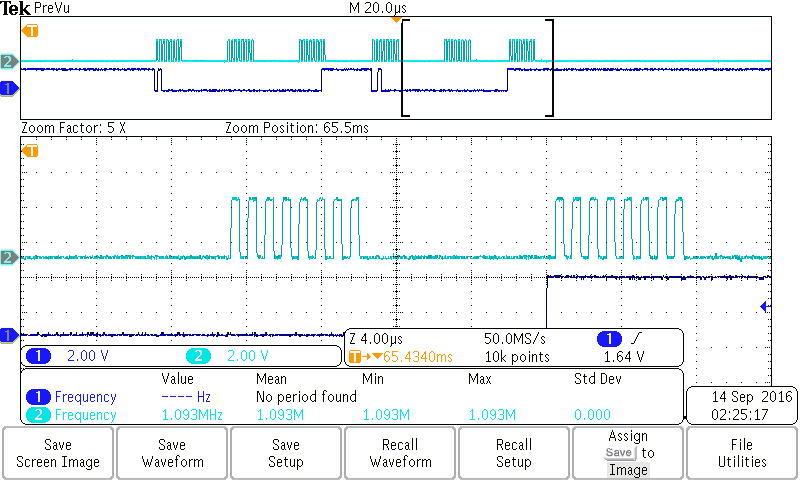
SCLK (2)- MISO (1) SIGNALS:


Please let me know if further information is required.
Thanks & Regards,
Vignesh


