Hi Everyone,
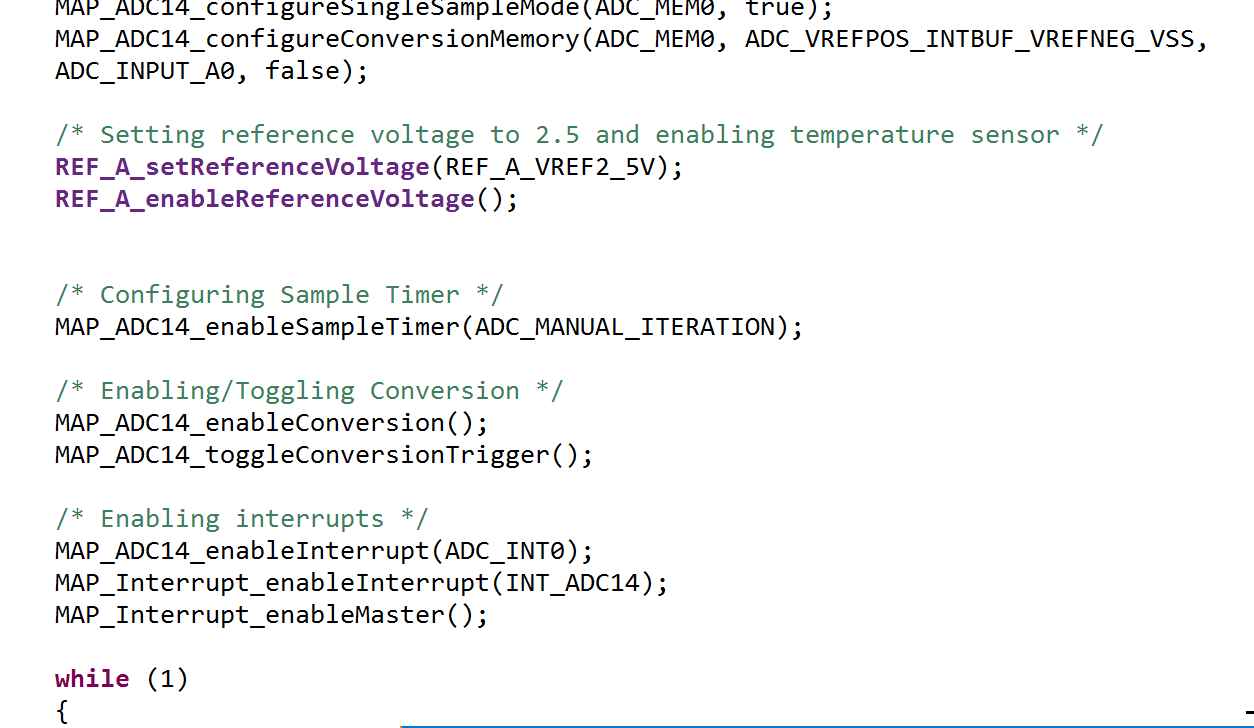
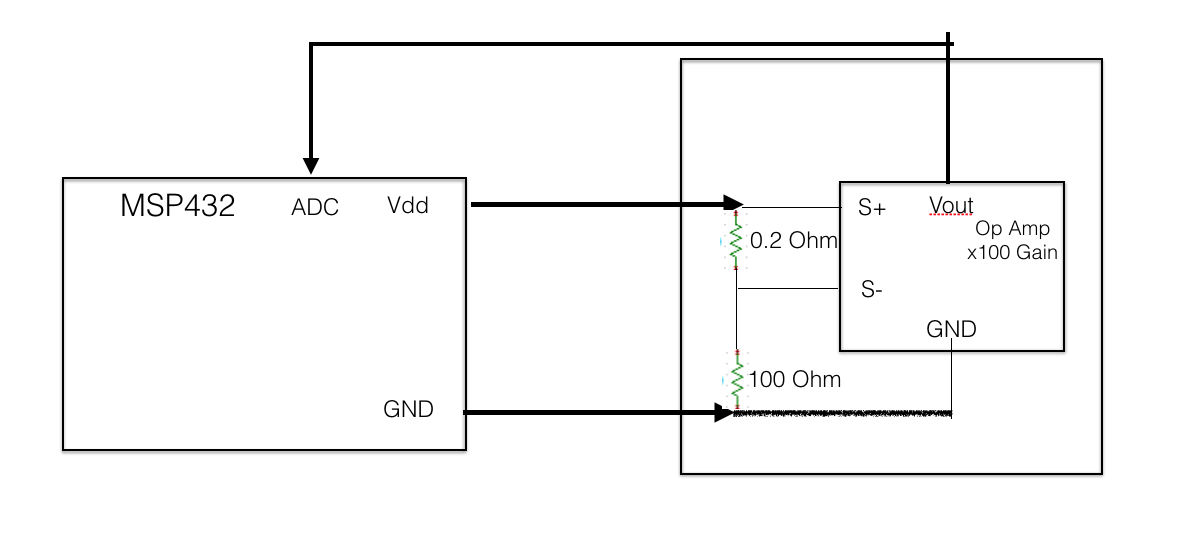
I am trying to use MSP432 on chip 14 bit ADC to sense output from a current sensing op-amp(https://datasheets.maximintegrated.c...s/MAX44284.pdf).
I am getting a large reading error from my ADC compare to the multimeter reading.
My question is
Do i need to have a front end amplifier to buffer the input to ADC, or I can directly sense it?
Thanks a lot,
Eddy

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.