


Hi,
When's the correct time to set a repeated start command for the USCIB0 in I2C mode? When I set UCTXSTT=1 during the TX ISR, the system issues a repeated start before transmitting the data, even though the state diagram shows it should issue the start afterwards. See diagram.

What I'm trying to do in the TX ISR is:
1. put data into UCB0TXBUF
2. change slave address
3. set UCTR = 1 or UCTR = 0, depending upon my needs for the next command
4. set UCTXSTT=1
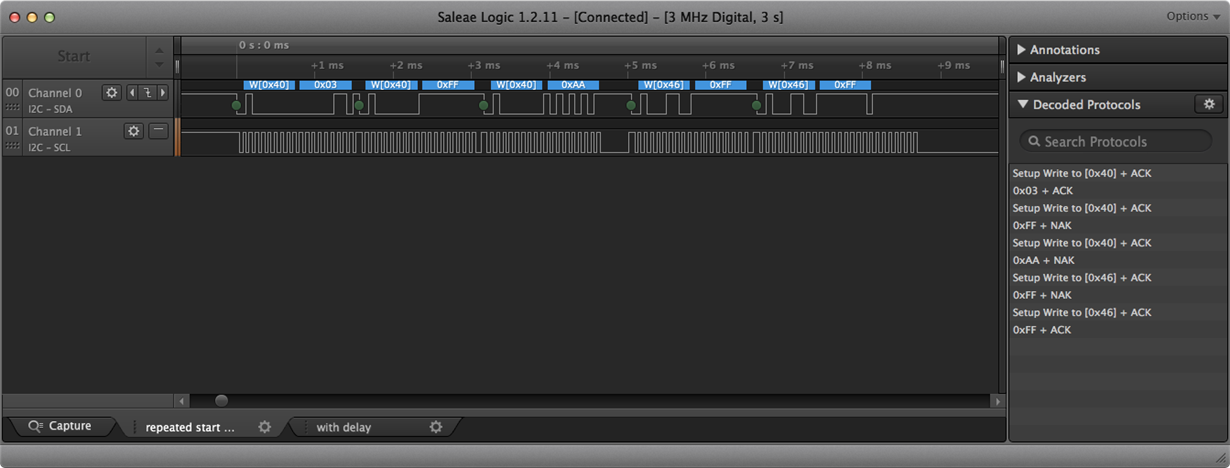
But this just produces a repeated start before sending the data and also skips about half of the data (see IMAGE 1 below).
I'm attempting to send this message:
0x0040>>1 | IO::USCI_I2C::ADDR, // set address
0x0003 | IO::USCI_I2C::WRITE, // set ptr
0x00FF | IO::USCI_I2C::WRITE, // write to register
0x0040>>1 | IO::USCI_I2C::ADDR, // set address
0x0001 | IO::USCI_I2C::WRITE, // set ptr
0x00AA | IO::USCI_I2C::WRITE, // write to register
0x0046>>1 | IO::USCI_I2C::ADDR, // set address
0x0003 | IO::USCI_I2C::WRITE, // set ptr
0x00FF | IO::USCI_I2C::WRITE, // write to register
0x0046>>1 | IO::USCI_I2C::ADDR, // set address
0x0001 | IO::USCI_I2C::WRITE, // set ptr
0x00AA | IO::USCI_I2C::WRITE // write to register
IMAGE 1: Here's the capture without a delay (incorrect):
I found that if I add a delay in the ISR, the data is in fact transmitted and then the start is issued.
// 3. RESTART w/ new address
else if(isAddr(nextCmd))
{
UCB0I2CSA = (uint8_t)nextCmd;
/* "Setting UCTXSTT generates a repeated START condition. In this case,
UCTR may be set or cleared to configure transmitter or receiver,
and a different slave address may be written into UCBxI2CSA, if
desired." */
// to accomplish this, send a start write or start read command
// this will set the UCTR flag appropriately and set the start bit
// increment counter past address cmd to get to next rd/wr command
// (we need to peek to see if it's a read or a write).
_delay_cycles(2000); // with this, the code will execute as expected, issuing a start AFTER the data is transmitted
nextCmd = seq[++seqCtr];
if(isWrite(nextCmd)) startWr();
else if(isRead(nextCmd)) startRd();
}
Code on github:  github.com/.../cribbage_LED
github.com/.../cribbage_LED
Here's a capture with delay (correct)

Here's my ISR an accompanying code.
/* USCII2C.h
* Created on: Dec 26, 2016
* Author: benny */
#ifndef USCII2C_H_
#define USCII2C_H_
// include to use standard types
#include <stdint.h>
namespace IO
{
class USCI_I2C
{
public:
// used as bitmasks to check addresses
enum TRANSACTION_TYPE {
ADDR = 1<<8,
READ = 1<<9,
WRITE = 1<<10
};
// maybe try this later to replace TRANSACTION_TYPE
// union I2C_TRANSACTION
// {
// uint16_t packet;
// uint8_t data;
// uint8_t isAddr: 1;
// uint8_t isRd: 1;
// uint8_t isWr: 1;
// };
USCI_I2C();
// initialize the I2C hardware and member variables
// currently just use MCLK as the clock source
// busy counts will prevent an infinite loop if the bus becomes permanently busy
// set to -1 to disable.
void init(double F_MCLK, double F_I2C, uint8_t defaultAddress,
unsigned busyCnts = 0, volatile unsigned char *SEL_PORT = 0,
uint8_t PINS = 0);
//
void transaction(uint16_t *seq, uint16_t seqLen,
uint8_t *recvData, uint16_t wakeupSRBits);
// Use this to check whether a previously scheduled I2C sequence has been
// fully processed.
inline bool done() { return(state == IDLE); };
// returns true if an acknowledge was received for the given address
// ported from TI_USCI_I2C_slave_present
// - made to work for eUSCI
// - replaced master-slave terminology w/ coordinator-client
bool checkAddr(uint8_t addr);
// used by ISR
inline void handleTxRxInt(bool isWrInt);
inline void startSeq();
private:
// check the flag set in the data packet
inline bool isAddr(uint16_t seq) { return seq & ADDR; };
inline bool isWrite(uint16_t seq) { return seq & WRITE; };
inline bool isRead(uint16_t seq) { return seq & READ; };
// start a write command (Coordinator-sender)
inline void startWr();
// start a read command (Coordinator-receiver)
inline void startRd();
inline void waitForBusFree();
// used by the state machine
// set even values to each state to allow quick processing
// in ISR using the __even_in_range intrinsic
// TODO: do I need this, or was this just for USI?
enum STATE {
IDLE = 0,
START = 2,
PREPARE_ACKNACK = 4,
HANDLE_RXTX = 6,
RECEIVED_DATA = 8,
PREPARE_STOP = 10,
STOP = 12
} state;
uint8_t defAddr; // default I2C address
uint16_t *seq;
uint16_t seqLen, seqCtr;
uint8_t *recvData;
uint16_t wakeupSRBits;
unsigned busyCnts;
};
// externally defined object required for use in the interrupt
extern USCI_I2C i2c;
} /* namespace IO */
#endif /* USCII2C_H_ */
/* USCII2C.cpp
* Created on: Dec 26, 2016
* Author: benny
*/
// include msp430 header to get access to USCI registers
#include "msp430.h"
#include "USCII2C.h"
#include <cassert>
#include <stdio.h>
IO::USCI_I2C::USCI_I2C()
{
this->state = IDLE;
}
void IO::USCI_I2C::init(double F_MCLK, double F_I2C, uint8_t defaultAddress,
unsigned busyCnts, volatile unsigned char *SEL_PORT, uint8_t PINS)
{
this->busyCnts = busyCnts;
if(this->busyCnts == 0) this->busyCnts = 1;
this->defAddr = defaultAddress;
// configure I2C pins, e.g. P1SEL1 |= (BIT6 | BIT7)
*SEL_PORT |= PINS;
// put eUSCI_B in reset state while we config it
UCB0CTLW0 = UCSWRST;
// use SMCLK as clock source, I2C Mode, send I2C stop
UCB0CTLW0 |= UCMODE_3 | UCMST | UCSSEL__SMCLK;
assert(F_MCLK/F_I2C > 1);
UCB0BRW = F_MCLK/F_I2C; // set I2C frequency
UCB0I2CSA = defaultAddress; // client address
UCB0CTLW0 &= ~UCSWRST; // put eUSCI_B in operational state
// enable TX interrupt and NACK interrupt
UCB0IE |= UCTXIE0 | UCNACKIE;
}
void IO::USCI_I2C::waitForBusFree() {
unsigned cnt = 0;
while (UCB0STAT & UCBBUSY)
{
// increment counter
busyCnts++;
// if counter hits threshold, alert user
if(cnt == busyCnts)
{
printf("oops! I2C bus frozen\n");
assert(0);
}
}
}
void IO::USCI_I2C::transaction(uint16_t *seq, uint16_t seqLen,
uint8_t *recvData, uint16_t wakeupSRBits)
{
// we can't start another sequence until the current one is done
if(UCB0STAT & UCBBUSY)
// send a stop
UCB0CTLW0 |= UCTXSTP;
waitForBusFree();
// load the sequence into the library:
assert(seq); // ensure we have a sequence
this->seq = seq;
assert(seqLen); // ensure we have a seqLength
this->seqLen = seqLen;
// no assert, could be a null ptr iff only writing
this->recvData = recvData;
// no assert, could not be waking up
this->wakeupSRBits = wakeupSRBits;
// update status
seqCtr = 0;
state = START;
// start the sequence transmission, trigger, but don't set data yet
startSeq();
// exit and handle the transaction from interrupts
}
inline void IO::USCI_I2C::startWr()
{
UCB0CTLW0 |= UCTR | UCTXSTT;
}
inline void IO::USCI_I2C::startRd()
{
UCB0CTLW0 &= ~UCTR; UCB0CTLW0 |= UCTXSTT;
}
bool IO::USCI_I2C::checkAddr(uint8_t addr)
{
uint8_t clientAddrBak, UCB0IEBak;
bool present;
UCB0IEBak = UCB0IE; // restore old UCB0I2CIE
clientAddrBak = UCB0I2CSA; // store old slave address
UCB0IE &= ~ UCNACKIE; // no NACK interrupt
UCB0I2CSA = addr; // set slave address
UCB0IE &= ~(UCTXIE0 | UCRXIE0); // no RX or TX interrupts
// disable interrupts so we can handle all interrupt flags here
// and not run any of the ISR code
__disable_interrupt();
UCB0CTLW0 |= UCTR | UCTXSTT | UCTXSTP; // I2C TX, start condition
while (UCB0CTLW0 & UCTXSTP); // wait for STOP condition
UCB0CTLW0 |= UCTXSTP;
present = !(UCB0IFG & UCNACKIFG);
UCB0IFG = 0x00; // clear the interrupts
__enable_interrupt();
UCB0I2CSA = clientAddrBak; // restore slave address
UCB0IE = UCB0IEBak; // restore interrupts
return present;
}
inline void IO::USCI_I2C::startSeq()
{
uint16_t curSeq = seq[seqCtr];
// 1. check for an address byte
if(isAddr(curSeq))
{
UCB0I2CSA = (uint8_t)curSeq;
curSeq = seq[++seqCtr]; // increment and process the next sequence entry
}
// 2a. check for a data read byte
if(isRead(curSeq)) startRd();
// 2b. check for a data write byte
else if(isWrite(curSeq)) startWr();
}
inline void IO::USCI_I2C::handleTxRxInt(bool isWrInt)
{
// TODO: make class private variable?
uint16_t curCmd = seq[seqCtr];
// use this to prepare for the next command.
// Don't set yet because we could be at the end of the sequence.
uint16_t nextCmd;
//////////////////////
// process current command:
//////////////////////
// check for a data write byte
if(isWrite(curCmd))
{
// write data from the sequence entry to the transmitter buffer
// UCB0TXBUF = (uint8_t)curSeq; // causes intermittent data loss :o cmds get truncated to 8 bits!
UCB0TXBUF = curCmd;
}
// check for a data read byte
else if(isRead(curCmd))
{
// TODO: grab data from register
unsigned dataRead = UCB0RXBUF;
}
//////////////////////
// prepare for next command
//////////////////////
// check for an impending stop or start
// 1. STOP: end of sequence encountered - check for end of sequence
if (seqCtr == seqLen)
{
// send a stop
UCB0CTLW0 |= UCTXSTP;
// set status to idle so user knows we're ready for a new sequence
this->state = IDLE;
return;
}
// no stop yet, load the next command in the sequence
seqCtr++;
nextCmd = seq[seqCtr];
// 2. RESTART w/ current address:
// 2.a. read->write
if(isWrite(nextCmd) & !isWrInt)
{
startWr();
}
// 2.b. write->read
else if(isRead(nextCmd) & isWrInt)
{
startRd();
}
// 3. RESTART w/ new address
else if(isAddr(nextCmd))
{
UCB0I2CSA = (uint8_t)nextCmd;
/* "Setting UCTXSTT generates a repeated START condition. In this case,
UCTR may be set or cleared to configure transmitter or receiver,
and a different slave address may be written into UCBxI2CSA, if
desired." */
// to accomplish this, send a start write or start read command
// this will set the UCTR flag appropriately and set the start bit
// increment counter past address cmd to get to next rd/wr command
// (we need to peek to see if it's a read or a write).
_delay_cycles(2000); // with this, the code will execute as expected, issuing a start AFTER the data is transmitted
nextCmd = seq[++seqCtr];
if(isWrite(nextCmd)) startWr();
else if(isRead(nextCmd)) startRd();
}
}
// I2C ISR
// address I2C interrupts here, including updating the
// transmission buffer register with the next byte
// to send
#pragma vector=USCI_B0_VECTOR
__interrupt void EUSCI_B0(void)
{
switch(__even_in_range(UCB0IV, USCI_I2C_UCBIT9IFG))
{
case USCI_NONE: break; // Vector 0: No interrupts
case USCI_I2C_UCALIFG: break; // Vector 2: ALIFG
case USCI_I2C_UCNACKIFG: // Vector 4: NACKIFG - client NACK'd
UCB0CTLW0 |= UCTXSTT; // resend start and address
break;
case USCI_I2C_UCSTTIFG: break; // Vector 6: STTIFG
case USCI_I2C_UCSTPIFG: break; // Vector 8: STPIFG
case USCI_I2C_UCRXIFG3: break; // Vector 10: RXIFG3
case USCI_I2C_UCTXIFG3: break; // Vector 12: TXIFG3
case USCI_I2C_UCRXIFG2: break; // Vector 14: RXIFG2
case USCI_I2C_UCTXIFG2: break; // Vector 16: TXIFG2
case USCI_I2C_UCRXIFG1: break; // Vector 18: RXIFG1
case USCI_I2C_UCTXIFG1: break; // Vector 20: TXIFG1
case USCI_I2C_UCRXIFG0: // Vector 22: RXIFG0 - received data is ready
IO::i2c.handleTxRxInt(false);
break;
case USCI_I2C_UCTXIFG0: // Vector 24: TXIFG0
// we completed a transaction, check for the next cmd
IO::i2c.handleTxRxInt(true);
break;
default: break;
}
__bic_SR_register_on_exit(LPM0_bits); // Exit LPM0
}
#include <msp430.h>
#include <intrinsics.h>
#include "InputHandler.h"
#include "cribbage_LED.h"
// TODO: remove, this is just for debugging I2C
#include "USCII2C.h"
// include to use standard types
#include <stdint.h>
// switch to turn off use of features on the launchpad
// E.g. LED's and buttons on the launchpad
#define LAUNCHPAD
IO::InputPin
UP (1, 1, 0, IO::PULLUP::UP),
DOWN (4, 5, 0, IO::PULLUP::UP),
RIGHT (1, 2, 0, IO::PULLUP::UP),
LEFT (1, 3, 0, IO::PULLUP::UP),
BACK (1, 4, 0, IO::PULLUP::UP),
ENTER (1, 5, 0, IO::PULLUP::UP);
// local function declarations
void setUpTimers(const double F_CLK, const double F_PIN_INTERRUPT);
void setUpPins(const double F_PIN_INTERRUPT);
int main(void)
{
Cribbage::Controller game;
const unsigned F_PIN_INTERRUPT = 500; // pin interrupt frequency [Hz]
const unsigned F_ACLK = 10e3;
const double F_MCLK = 8e6; // desired MCLK frequency [Hz]
WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
// unlock clock system (CS)
CSCTL0 = CSKEY;
// set MCLK frequency to 8MHz (DCOFSEL = "110b = If DCORSEL = 0")
CSCTL1 |= DCOFSEL2_L | DCOFSEL1_L;
// VLO -> ACLK, DCO -> MCLK,
CSCTL2 |= SELA__VLOCLK | SELM__DCOCLK;
// setup timers for input debouncing
setUpTimers(F_ACLK, F_PIN_INTERRUPT);
// init inputs
setUpPins(F_PIN_INTERRUPT);
// clear lock on port settings
PM5CTL0 &= ~LOCKLPM5;
// setup and check HW:
game.sysInit(F_MCLK);
// TODO: remove, this is just for debugging I2C
uint16_t dummyTransaction[] =
{
0x0040>>1 | IO::USCI_I2C::ADDR, // set address
0x0003 | IO::USCI_I2C::WRITE, // set ptr
0x00FF | IO::USCI_I2C::WRITE, // write to register
0x0040>>1 | IO::USCI_I2C::ADDR, // set address
0x0001 | IO::USCI_I2C::WRITE, // set ptr
0x00AA | IO::USCI_I2C::WRITE, // write to register
0x0046>>1 | IO::USCI_I2C::ADDR, // set address
0x0003 | IO::USCI_I2C::WRITE, // set ptr
0x00FF | IO::USCI_I2C::WRITE, // write to register
0x0046>>1 | IO::USCI_I2C::ADDR, // set address
0x0001 | IO::USCI_I2C::WRITE, // set ptr
0x00AA | IO::USCI_I2C::WRITE // write to register
};
__enable_interrupt();
while(1)
{
_delay_cycles(1000);
if(UP.read())
{
P1OUT ^= BIT0;
IO::i2c.transaction(dummyTransaction, sizeof(dummyTransaction)/sizeof(dummyTransaction[0]), 0, 0);
}
if(DOWN.read())
{
P4OUT ^= BIT6;
}
_BIS_SR(LPM0_bits); // enter LPM0
}
// game.run();
return 0;
}
//////////////////////////////////////////////////////////////
// main support functions and ISRs
//////////////////////////////////////////////////////////////
void setUpTimers(double F_CLK, double F_PIN_INTERRUPT)
//void setUpTimers(const double F_CLK)
{
TA0CCR0 = F_CLK/8/F_PIN_INTERRUPT;
TA0CCR1 = 0xFFFF;
TA0CCR2 = 0xFFFF;
// SMCLK, /8, count to CCR0, enable interrupts
TA0CTL = TASSEL__ACLK | ID_3 | MC__UP | TAIE;
// enable interrupt for TA0 CCR0
TA0CCTL0 = CCIE;
}
void setUpPins(const double F_PIN_INTERRUPT)
//void setUpPins()
{
double t_int_ms = 1.0 / (double)F_PIN_INTERRUPT * 1000.0;
// link the pins defined here to cribbage library,
// this allows the cribbage board to use the pins
// for game control :)
Cribbage::UP = &UP;
Cribbage::DOWN = &DOWN;
Cribbage::RIGHT = &RIGHT;
Cribbage::LEFT = &LEFT;
Cribbage::BACK = &BACK;
Cribbage::ENTER = &ENTER;
// initialize the input pins
UP.init( 25.0, 3.0, 100.0, t_int_ms);
DOWN.init( 25.0, 3.0, 100.0, t_int_ms);
RIGHT.init( 25.0, 3.0, 100.0, t_int_ms);
LEFT.init( 25.0, 3.0, 100.0, t_int_ms);
BACK.init( 25.0, 3.0, 100.0, t_int_ms);
ENTER.init( 25.0, 3.0, 100.0, t_int_ms);
#ifdef LAUNCHPAD
// these pins are for debugging on the launchpad only
P1DIR |= BIT0;
P4DIR |= BIT6;
#endif
}
// disable WDT before any initialization takes place to prevent
// WDT reset during initialization of memory
int _system_pre_init(void)
{
WDTCTL = WDTPW | WDTHOLD;
return 1;
}
// ISR's
// Timer A0 interrupt service routine
#pragma vector=TIMER0_A0_VECTOR
#pragma vector=TIMER0_A1_VECTOR // why do I need this???
__interrupt void Timer_A (void)
{
// check for debounce interrupt TA0IV;
if(TA0IV & TA0IV_TAIFG)
{
UP.debounce();
DOWN.debounce();
RIGHT.debounce();
LEFT.debounce();
BACK.debounce();
ENTER.debounce();
}
__bic_SR_register_on_exit(LPM0_bits); // Exit LPM0
}



{kind=link}