Other Parts Discussed in Thread: CAPTIVATE-BSWP, MSP-EXP430FR2311
Hi,
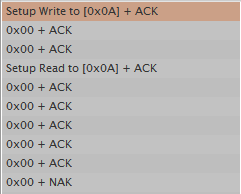
I am trying to read proximity sensor packets from MSP430FR2633 MCU via I2C (bulk) interface. The slave address I'm using is 0x0A. So, the master (host) sends the following sequence:
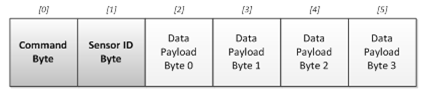
[0x00][0x01] (first byte 0x00 corresponds to command id and second byte 0x01 to sensor id [of the proximity sensor]).
I use the i2c helper functions in i2cbsl.c. Thus, for the above I do as follows:
uint8_t writeBuffer[2] = {0x00, 0x01};
uint8_t readBuffer[100];
MSP430BSL_I2CWriteRead(writeBuffer, 2, readBuffer, 8);
Although I get some data in the readBuffer, it does not look as expected. For example, the first and second bytes in the readBuffer are not 0x00 and 0x01. The following is the sequence I get:
18 01 00 00 00 00 00 f9
18 01 00 01 00 00 00 f8
08 00 00 00 00 00 00 00
0c 01 01 00 00 00 00 0e
08 00 01 00 00 00 00 01
18 01 02 00 00 00 00 45
08 00 02 ff ff 00 00 00
14 01 03 00 00 00 00 f0
08 00 03 ff ff 00 00 01
... repeats many times....
Could you help me understand what is going on? Any tips/information on debugging is most welcome. Is there documentation (other than CapTIvate technology guide) that I can refer to regarding how to interpret the various packets (sensor, cycle, general purpose etc.).
Thanks,
Santhosh.