Other Parts Discussed in Thread: MSP430G2553
Tool/software: Code Composer Studio
Hi,
I want to control four daisy chained SPI slaves with the MSP430 (the master device). I have several issues doing this:
1. I want the SPI clk rate to be 16 MHz, the maximum clk frequency of my microcontroller. Here is what I do:
BCSCTL1 = CALBC1_16MHZ; // Set range to 16MHz DCOCTL = CALDCO_16MHZ; // Set DCO step and modulation to 16MHz UCA0BR0 |= 0x01; //baud rate UCA0BR1 = 0;
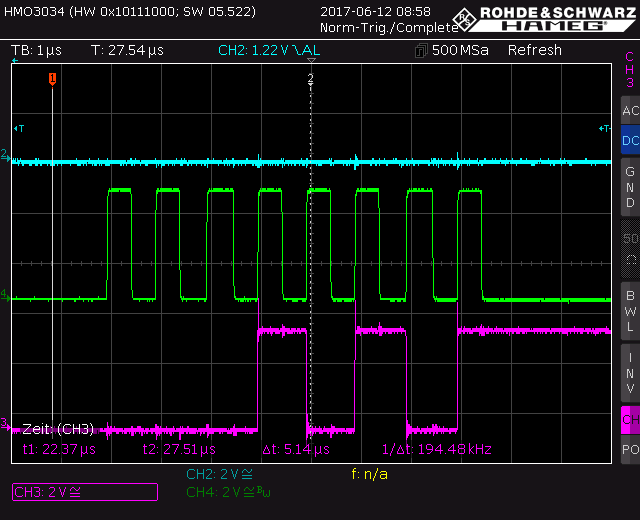
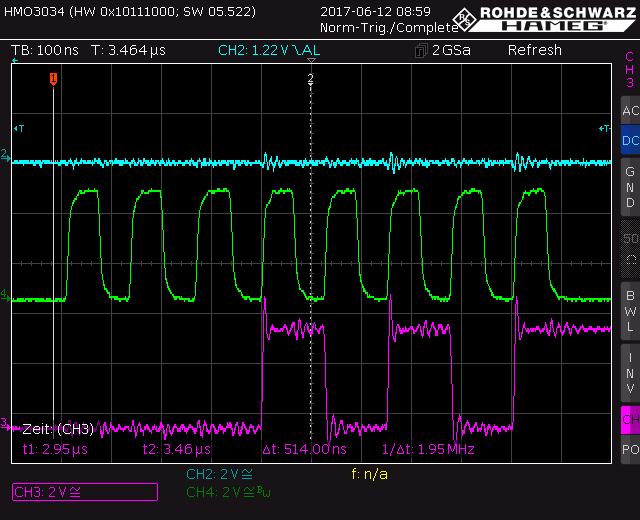
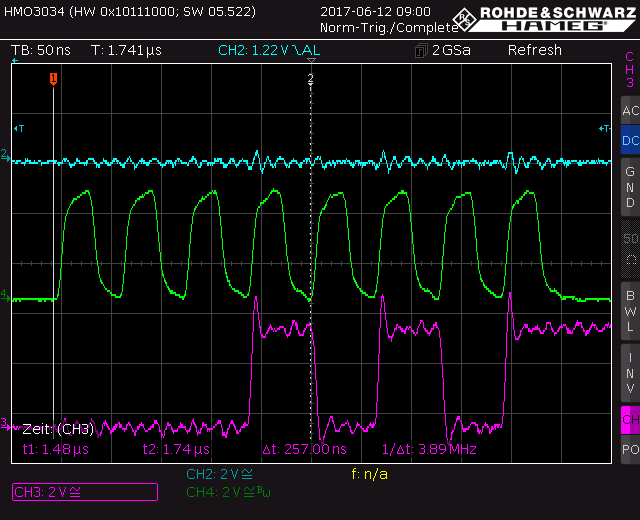
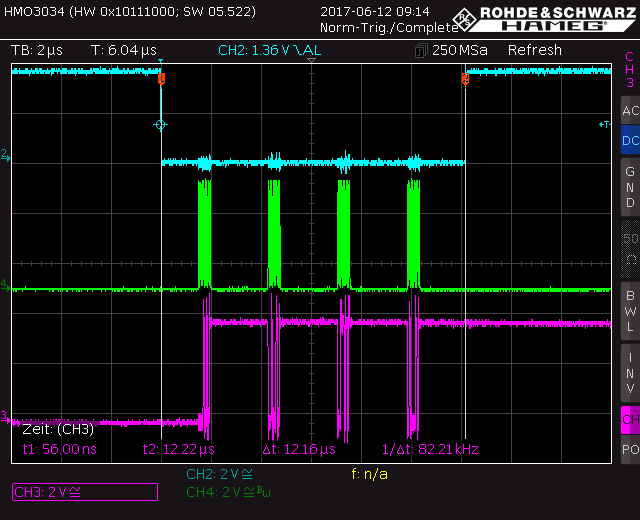
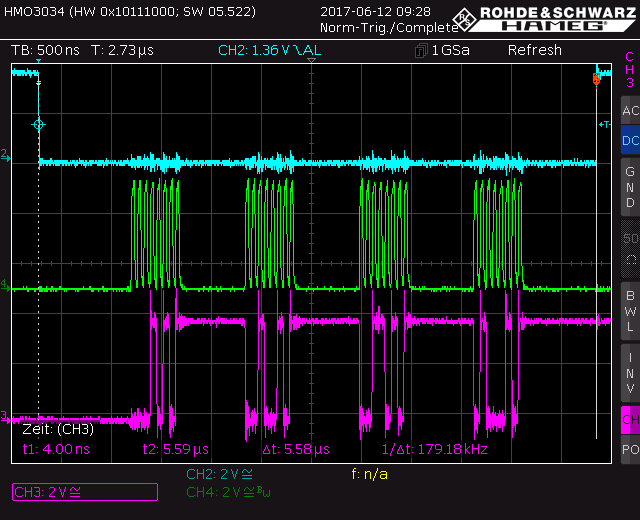
When I set the clk rate to 16MHz, and observe the Din and SCLK signal generated by MSP430, it looks almost like a sine wave (the rise time is really slow). When I slow down the clk to 1 MHZ, the two signals look fine. I want to run the SPI clk at 16 MHz. How can I do that without compromising the signal integrity?
2. Each slave device has 8 switches, so for four devices, I need to send 32 bits to slave one. The bits should then travel through the shift registers to get to the last device.I do not know how to do this. I am sending 8 bits as follows:
P1OUT &= ~0x02; //select device
if (IFG2 & UCA0TXIFG) //if USCI_A0 TX buffer ready
{
UCA0TXBUF = 0x2D; //send data over SPI to slave
}
if (IFG2 & UCA0RXIFG); // if USCI_A0 RX Received
{
received_ch = UCA0RXBUF; // Store received data
P1OUT |= 0x02; //unselect device, update switches
}
Can anyone tell me how to do this?
Here is the entire code for your reference:
#include "msp430G2553.h"
volatile char received_ch = 0;
int main(void) {
WDTCTL = (WDTPW | WDTHOLD); // Stop watchdog timer
BCSCTL1 = CALBC1_16MHZ; // Set range to 16MHz
DCOCTL = CALDCO_16MHZ; // Set DCO step and modulation to 16MHz
P1OUT &= ~0x02; // Chip select (P1.1)
P1DIR |= 0x02; // Set the pins to output direction
P1SEL = 0x14; // Set special function to timer module (P1.4-->Sclk, P1.2-->DIN)
P1SEL2 = 0x14; //Universal serial communication
UCA0CTL1 = UCSWRST; //put the module in reset mode to set up operations
UCA0CTL0 |= UCCKPH + UCMSB + UCMST + UCSYNC; //3-pin, 8-bit SPI master
UCA0CTL1 |= UCSSEL_2; //SMCLK
UCA0BR0 |= 0x01; //baud rate
UCA0BR1 = 0;
UCA0MCTL = 0; //no modulation, should be cleared when using SPI mode
UCA0CTL1 &= ~UCSWRST; //initialize USCI state machine
IE2 |= UCA0TXIE; //Enable USCI0 TX interrupt
_BIS_SR(GIE); // Enable global interrupts
while( 1 ); // Endless loop
}
#pragma vector=USCIAB0TX_VECTOR
__interrupt void USCI0TX_ISR(void)
{
P1OUT &= ~0x02; //Sync not is active low. When low, DIN and shift registers are enabled, when high data is updated.
if (IFG2 & UCA0TXIFG) //if USCI_A0 TX buffer ready
{
UCA0TXBUF = 0x2D; //send data over SPI to slave
}
if ((IFG2 & UCA0RXIFG)); // if USCI_A0 RX Received
{
received_ch = UCA0RXBUF; // Store received data
P1OUT |= 0x02; //unselect device, update switches
}
}