Part Number: MSP430F5529
Hi,
I have the following problem: I'm using an external trigger signal (~8 kHz) for getting data via the SPI interface.
When using a an interrupt handler on the corresponding input port, this works fine. Now I'm trying to transfer
the data via the USB interface (using the CDC example code from TI which comes with CCS (C6_SendDataInBackground)).
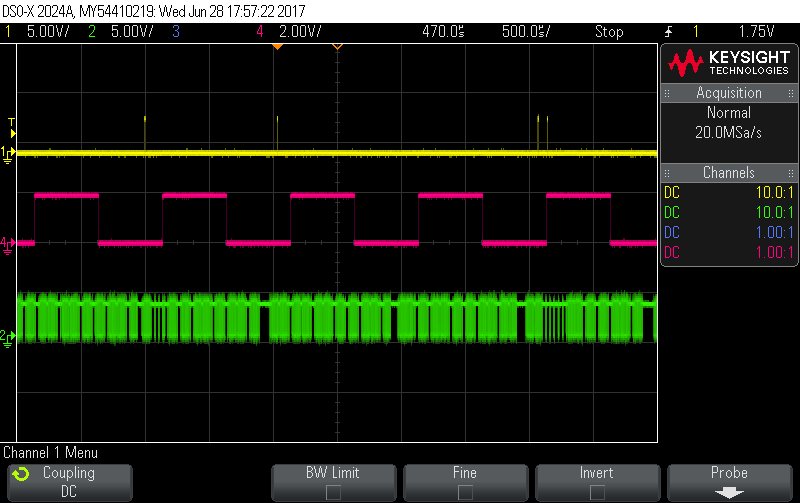
The USB data transfer works fine (660 kB/s) , however the interrupts of the trigger input port are generated irregularly.
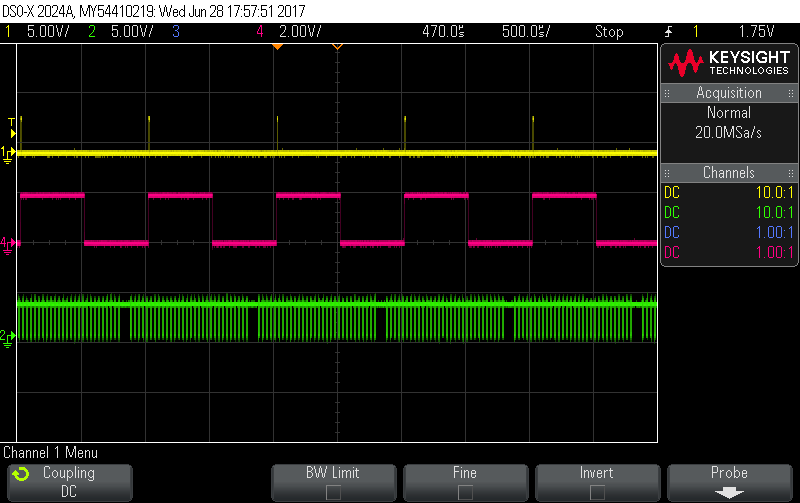
I've simplified my code to just toggle an output pin in the interrupt service routine and am able to watch both trigger signal
and output pin on an oscilloscope...
My question now is: what is the best way to do data transfer using USB without missing the external triggers?