- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Part Number: MSP432P401R
Tool/software: TI-RTOS
Hi All,
In my application, msp432 needs to set other devices and communicate with host through SPI and measure voltage with internal ADC.
So I modify the spiloopback example to achieve these functions.
1.remove slavethread
2.add spi/gpio/adc code at masterthread
There are 4 SPI in my application(2 master mode/2 slave mode,UCA0/A2/B0/B2)
When the code runs, it will set external devices through the 2 master SPI. Then the code will enter enter a while(1) loop.
In the while loop, the host SPI(slave mode) will prepare to communicate with host when the spi_host_en(msp432 p1.0) is high.
In my experiment,
1.the master mode SPI will stuck at
transferOK = SPI_transfer( spi_handle_dac1, &spi_trans_dac1 );
After turning bitrate, the code can go to next line. Why? My bitrate range is under 10MHz.
2.In the while loop, if host pulls the spi_host_en high and sends clk to msp432, msp432 always sends the last byte of tx buffer(8 byte).
Is there any configuration error in my code or some constraints on msp432?
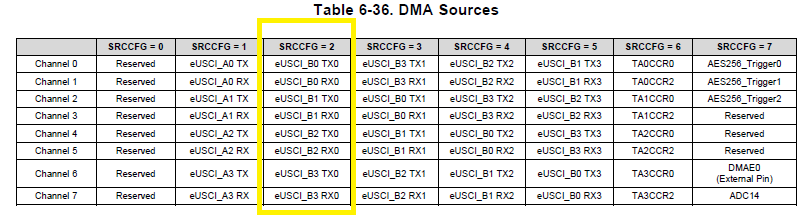
3.In MSP_EXP432P401R.c, I need to add the SPI configuration. But I find the tx/rxDMAChannelIndex for UCA0 in dma.h only have DMA_CH0_EUSCIA0TX/DMA_CH1_EUSCIA0RX.
So if i want to use UCA0, only DMA_CH0_EUSCIA0TX/DMA_CH1_EUSCIA0RX is usable?

**Attention** This is a public forum