Other Parts Discussed in Thread: MSP430FR2355, MSP430WARE
Hello,
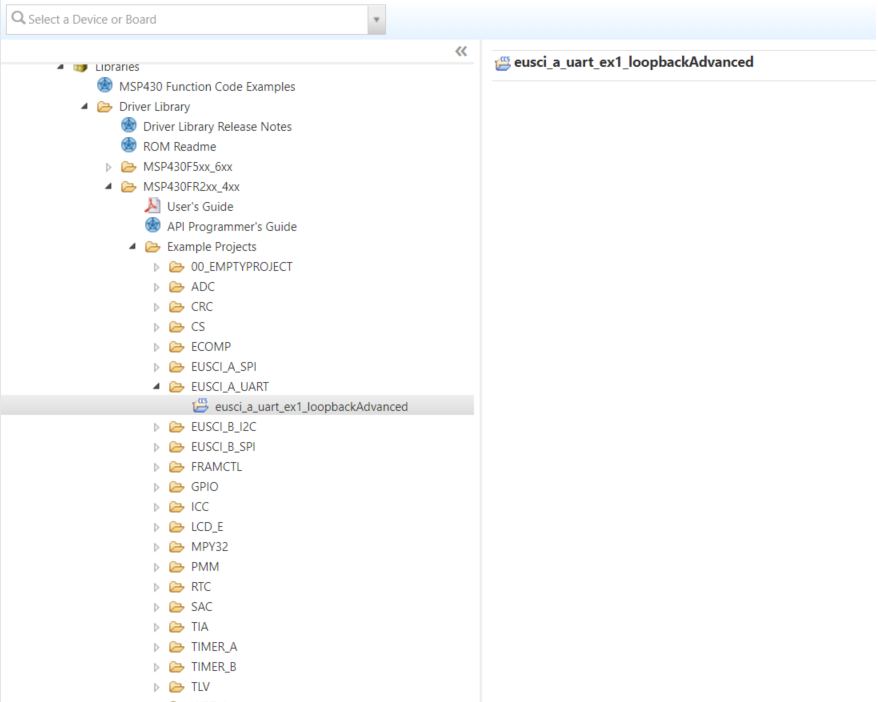
I am looking for uart drivers for msp430fr2153 and msp430fr2355. I have gone through resource explorer in ccs v8.2 I have found only the user guide for drivers, but I haven't found any examples on the driver.
B.R.
Gourav