


Tool/software: Code Composer Studio
hi,
ive been trying to configure spi of msp432p401r as master in 4 wire or 4 pin mode and use B1 instead of B0 based on the 3 wire master example provided. but i couldnt, i just want to transfer a data to slave using 4 wire mode the code i edited is given below please help me out. i get error in line 68 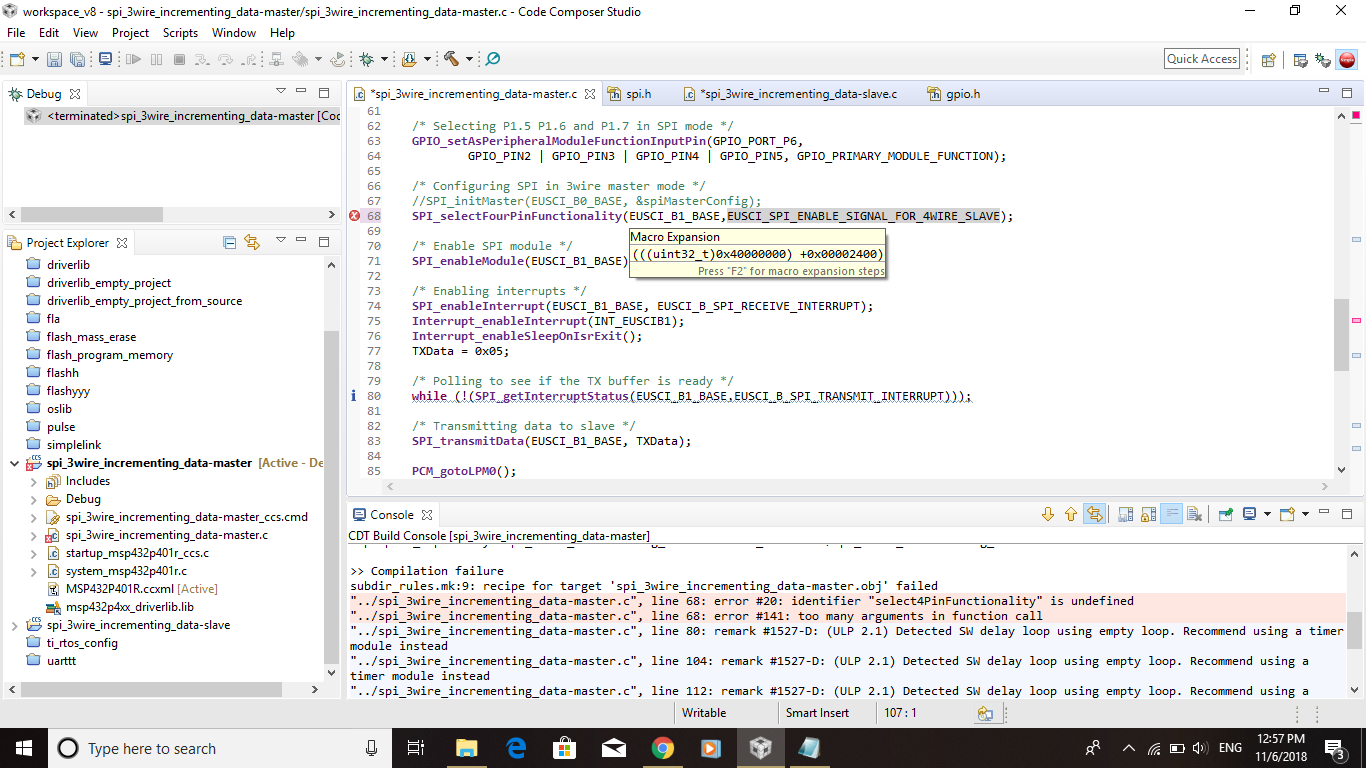
/* MSP432 SPI - 3-wire Master Incremented Data
*
* This example shows how SPI master talks to SPI slave using 3-wire mode.
* Incrementing data is sent by the master starting at 0x01. Received data is
* expected to be same as the previous transmission. eUSCI RX ISR is used to
* handle communication with the CPU, normally in LPM0. Because all execution
* after LPM0 is in ISRs, initialization waits for DCO to stabilize against
* ACLK.
*
* Note that in this example, EUSCIB0 is used for the SPI port. If the user
* wants to use EUSCIA for SPI operation, they are able to with the same APIs
* with the EUSCI_AX parameters.
*
* ACLK = ~32.768kHz, MCLK = SMCLK = DCO 3MHz
*
* Use with SPI Slave Data Echo code example.
*
* MSP432P401
* -----------------
* | |
* | |
* | |
* | P1.6|-> Data Out (UCB0SIMO)
* | |
* | P1.7|<- Data In (UCB0SOMI)
* | |
* | P1.5|-> Serial Clock Out (UCB0CLK)
* Author: Timothy Logan
*******************************************************************************/
/* DriverLib Includes */
#include "driverlib.h"
/* Standard Includes */
#include <stdint.h>
#include <stdbool.h>
/* Statics */
static volatile uint8_t RXData = 0;
static uint8_t TXData = 0;
/* SPI Master Configuration Parameter */
const eUSCI_SPI_MasterConfig spiMasterConfig =
{
EUSCI_B_SPI_CLOCKSOURCE_SMCLK, // SMCLK Clock Source
3000000, // SMCLK = DCO = 3MHZ
500000, // SPICLK = 500khz
EUSCI_B_SPI_MSB_FIRST, // MSB First
EUSCI_B_SPI_PHASE_DATA_CHANGED_ONFIRST_CAPTURED_ON_NEXT, // Phase
EUSCI_B_SPI_CLOCKPOLARITY_INACTIVITY_HIGH, // High polarity
EUSCI_SPI_4PIN_UCxSTE_ACTIVE_HIGH // 3Wire SPI Mode
};
int main(void)
{
volatile uint32_t ii;
/* Halting WDT */
WDT_A_holdTimer();
/* Selecting P1.5 P1.6 and P1.7 in SPI mode */
GPIO_setAsPeripheralModuleFunctionInputPin(GPIO_PORT_P6,
GPIO_PIN2 | GPIO_PIN3 | GPIO_PIN4 | GPIO_PIN5, GPIO_PRIMARY_MODULE_FUNCTION);
/* Configuring SPI in 3wire master mode */
//SPI_initMaster(EUSCI_B0_BASE, &spiMasterConfig);
SPI_selectFourPinFunctionality(EUSCI_B1_BASE,EUSCI_SPI_ENABLE_SIGNAL_FOR_4WIRE_SLAVE);
/* Enable SPI module */
SPI_enableModule(EUSCI_B1_BASE);
/* Enabling interrupts */
SPI_enableInterrupt(EUSCI_B1_BASE, EUSCI_B_SPI_RECEIVE_INTERRUPT);
Interrupt_enableInterrupt(INT_EUSCIB1);
Interrupt_enableSleepOnIsrExit();
TXData = 0x05;
/* Polling to see if the TX buffer is ready */
while (!(SPI_getInterruptStatus(EUSCI_B1_BASE,EUSCI_B_SPI_TRANSMIT_INTERRUPT)));
/* Transmitting data to slave */
SPI_transmitData(EUSCI_B1_BASE, TXData);
PCM_gotoLPM0();
__no_operation();
}
//******************************************************************************
//
//This is the EUSCI_B0 interrupt vector service routine.
//
//******************************************************************************
void EUSCIB1_IRQHandler(void)
{
uint32_t status = SPI_getEnabledInterruptStatus(EUSCI_B1_BASE);
uint32_t jj;
SPI_clearInterruptFlag(EUSCI_B1_BASE, status);
if(status & EUSCI_B_SPI_RECEIVE_INTERRUPT)
{
/* USCI_B0 TX buffer ready? */
while (!(SPI_getInterruptStatus(EUSCI_B1_BASE, EUSCI_B_SPI_TRANSMIT_INTERRUPT)));
RXData = SPI_receiveData(EUSCI_B1_BASE);
/* Send the next data packet */
SPI_transmitData(EUSCI_B1_BASE, TXData);
/* Delay between transmissions for slave to process information */
for(jj=50;jj<50;jj++);
}
}

