Tool/software: Code Composer Studio
Dear sir/madam
I have a project work with MSP430FR2433 and LIS3DSH
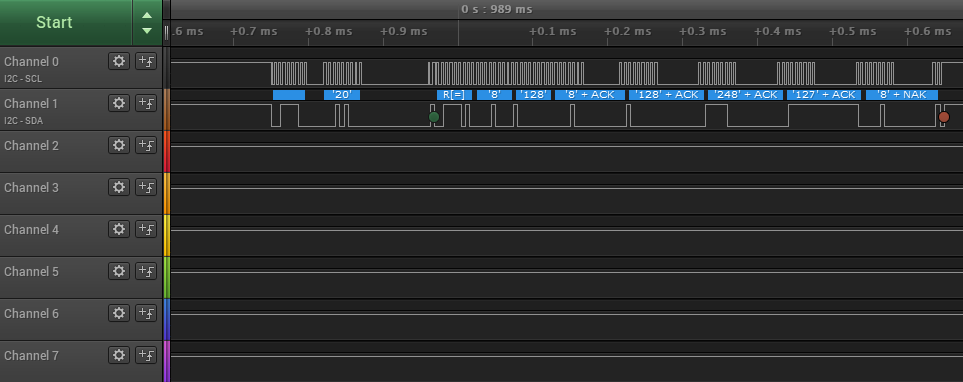
I search some code in internet and edited it.The problems is if I read ONE byte, it worked. I sent WHO IS command and the sensor sent exactly byte I want.
But if I've tried read multi bytes. The sensor sent wrong data and after that, If I read one byte, it sent wrong data, too.
My code is here.
Could you help me to fix my code?
/*
* User_I2C.h
*
* Created on: Sep 26, 2018
* Author: Dzung
*/
#ifndef USER_I2C_H_
#define USER_I2C_H_
#define MAX_BUFFER_SIZE 20
//******************************************************************************
// General I2C State Machine ***************************************************
//******************************************************************************
typedef enum I2C_ModeEnum{
IDLE_MODE,
NACK_MODE,
TX_REG_ADDRESS_MODE,
RX_REG_ADDRESS_MODE,
TX_DATA_MODE,
RX_DATA_MODE,
SWITCH_TO_RX_MODE,
SWITHC_TO_TX_MODE,
TIMEOUT_MODE,
SCAN_MODE
} I2C_Mode;
/* Used to track the state of the software state machine*/
I2C_Mode MasterMode = IDLE_MODE;
/* The Register Address/Command to use*/
uint8_t TransmitRegAddr = 0;
/* ReceiveBuffer: Buffer used to receive data in the ISR
* RXByteCtr: Number of bytes left to receive
* ReceiveIndex: The index of the next byte to be received in ReceiveBuffer
* TransmitBuffer: Buffer used to transmit data in the ISR
* TXByteCtr: Number of bytes left to transfer
* TransmitIndex: The index of the next byte to be transmitted in TransmitBuffer
* */
uint8_t ReceiveBuffer[MAX_BUFFER_SIZE] = {0};
uint8_t RXByteCtr = 0;
uint8_t ReceiveIndex = 0;
uint8_t TransmitBuffer[MAX_BUFFER_SIZE] = {0};
uint8_t TXByteCtr = 0;
uint8_t TransmitIndex = 0;
void CopyArray(uint8_t *source, uint8_t *dest, uint8_t count)
{
uint8_t copyIndex = 0;
for (copyIndex = 0; copyIndex < count; copyIndex++)
{
dest[copyIndex] = source[copyIndex];
}
}
I2C_Mode I2C_Master_ReadReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t count)
{
// Initialize state machine
MasterMode = TX_REG_ADDRESS_MODE;
TransmitRegAddr = reg_addr;
RXByteCtr = count;
TXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
// Initialize slave address and interrupts
UCB0I2CSA = dev_addr;
UCB0IFG &= ~(UCTXIFG + UCRXIFG); // Clear any pending interrupts
UCB0IE &= ~UCRXIE; // Disable RX interrupt
UCB0IE |= UCTXIE; // Enable TX interrupt
//
UCB0CTLW0 |= UCTR + UCTXSTT; // I2C TX, start condition
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0 w/ interrupts
return MasterMode;
}
void I2C_readByte(uint8_t devAddr, uint8_t regAddr, uint8_t* data)
{
I2C_Master_ReadReg(devAddr, regAddr, 1);
CopyArray(ReceiveBuffer, data, 1);
}
void I2C_readBytes(uint8_t devAddr, uint8_t regAddr, uint8_t* data, uint8_t length)
{
I2C_Master_ReadReg(devAddr, regAddr, length);
CopyArray(ReceiveBuffer, data, length);
}
I2C_Mode I2C_Master_WriteReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t *reg_data, uint8_t count)
{
// Initialize state machine
MasterMode = TX_REG_ADDRESS_MODE;
TransmitRegAddr = reg_addr;
//Copy register data to TransmitBuffer
CopyArray(reg_data, TransmitBuffer, count);
TXByteCtr = count;
RXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
// Initialize slave address and interrupts
UCB0I2CSA = dev_addr;
UCB0IFG &= ~(UCTXIFG + UCRXIFG); // Clear any pending interrupts
UCB0IE &= ~UCRXIE; // Disable RX interrupt
UCB0IE |= UCTXIE; // Enable TX interrupt
//
UCB0CTLW0 |= UCTR + UCTXSTT; // I2C TX, start condition
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0 w/ interrupts
return MasterMode;
}
void I2C_writeByte(uint8_t devAddr, uint8_t regAddr, uint8_t data)
{
I2C_Master_WriteReg(devAddr, regAddr, &data, 1);
}
void I2C_Init(void)
{
// I2C pins
P1SEL0 |= BIT2 + BIT3;
P1SEL1 &= ~(BIT2 | BIT3);
UCB0CTLW0 = UCSWRST; // Enable SW reset
UCB0CTLW0 |= UCMODE_3 | UCMST | UCSSEL__SMCLK | UCSYNC; // I2C master mode, SMCLK
UCB0BRW = 3; // fSCL = SMCLK/160 = ~100kHz
UCB0CTLW0 &= ~UCSWRST; // Clear SW reset, resume operation
UCB0IE |= UCNACKIE;
}
//******************************************************************************
// I2C Interrupt ***************************************************************
//******************************************************************************
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector = USCI_B0_VECTOR
__interrupt void USCI_B0_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCI_B0_VECTOR))) USCI_B0_ISR (void)
#else
#error Compiler not supported!
#endif
{
//Must read from UCB0RXBUF
uint8_t rx_val = 0;
switch(__even_in_range(UCB0IV, USCI_I2C_UCBIT9IFG))
{
case USCI_NONE: break; // Vector 0: No interrupts
case USCI_I2C_UCALIFG: break; // Vector 2: ALIFG
case USCI_I2C_UCNACKIFG: // Vector 4: NACKIFG
break;
case USCI_I2C_UCSTTIFG: break; // Vector 6: STTIFG
case USCI_I2C_UCSTPIFG: break; // Vector 8: STPIFG
case USCI_I2C_UCRXIFG3: break; // Vector 10: RXIFG3
case USCI_I2C_UCTXIFG3: break; // Vector 12: TXIFG3
case USCI_I2C_UCRXIFG2: break; // Vector 14: RXIFG2
case USCI_I2C_UCTXIFG2: break; // Vector 16: TXIFG2
case USCI_I2C_UCRXIFG1: break; // Vector 18: RXIFG1
case USCI_I2C_UCTXIFG1: break; // Vector 20: TXIFG1
case USCI_I2C_UCRXIFG0: // Vector 22: RXIFG0
rx_val = UCB0RXBUF;
if (RXByteCtr)
{
ReceiveBuffer[ReceiveIndex++] = rx_val;
RXByteCtr--;
}
if (RXByteCtr == 1)
{
UCB0CTLW0 |= UCTXSTP; //UCTXSTP;
}
else if (RXByteCtr == 0)
{
UCB0IE &= ~UCRXIE;
MasterMode = IDLE_MODE;
__bic_SR_register_on_exit(CPUOFF);// Exit LPM0
}
break;
case USCI_I2C_UCTXIFG0: // Vector 24: TXIFG0
switch (MasterMode)
{
case TX_REG_ADDRESS_MODE:
UCB0TXBUF = TransmitRegAddr;
if (RXByteCtr)
MasterMode = SWITCH_TO_RX_MODE; // Need to start receiving now
else
MasterMode = TX_DATA_MODE; // Continue to transmision with the data in Transmit Buffer
break;
case SWITCH_TO_RX_MODE:
UCB0IE |= UCRXIE; // Enable RX interrupt
UCB0IE &= ~UCTXIE; // Disable TX interrupt
UCB0CTLW0 &= ~UCTR; // Switch to receiver
MasterMode = RX_DATA_MODE; // State state is to receive data
UCB0CTLW0 |= UCTXSTT; // Send repeated start
if (RXByteCtr == 1)
{
//Must send stop since this is the N-1 byte
while((UCB0CTLW0 & UCTXSTT));
UCB0CTLW0 |= UCTXSTP; // Send stop condition
}
break;
case TX_DATA_MODE:
if (TXByteCtr)
{
UCB0TXBUF = TransmitBuffer[TransmitIndex++];
TXByteCtr--;
}
else
{
//Done with transmission
UCB0CTLW0 |= UCTXSTP; // Send stop condition
MasterMode = IDLE_MODE;
UCB0IE &= ~UCTXIE; // disable TX interrupt
__bic_SR_register_on_exit(CPUOFF); // Exit LPM0
}
break;
default:
__no_operation();
break;
}
break;
default: break;
}
}
#endif /* USER_I2C_H_ */