


Tool/software: TI-RTOS
Hi:
I'm debugging the ti_154_gateway_ibm code on the MSP432E401Y launchpad,there are two questions as follows:
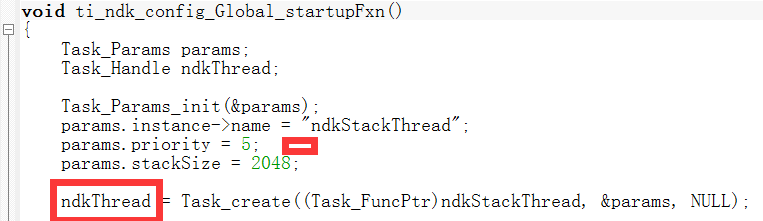
(1)I don't understand why there are tasks and pthreads in programs,what is the difference between Tasks and pthreads;
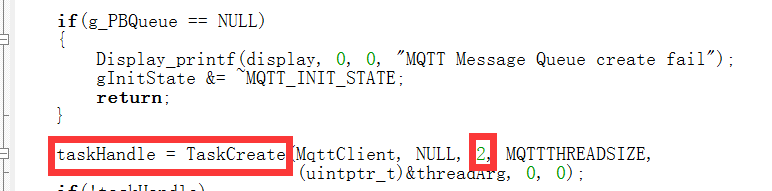
(2)Which is the highest priority?MqttClient and MqttClientThread have the same priority?



thanks!

