Part Number: MSP430FR5994
Hi,
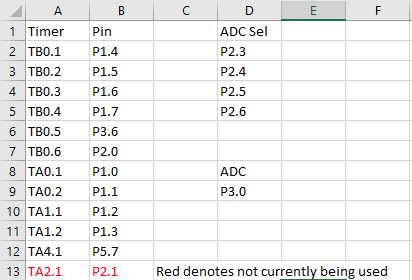
So I have a problem of where I'm sending back ADC data to a computer via UART. I have 11 channels for the ADC, I need to know which channel is which on the computer side of what I'm receiving. The problem that I can't seem to find a elegant solution to is how to know which channel the data is for.
The ADC data comes out between 0x0FFF and 0x0000. On the computer side, I check the 2 bytes to see if there's a 0 in the MSByte (most significant byte) and if there isn't then the data is flipped. If I instead use that 0 in the MSByte to do 0-B to do channel designations then I cannot know which one is the correct first two bytes. If I send an arbitrary two bytes then I won't be able to tell if it's an ADC result or the actual channel designation. Any ideas? I'm using python with PySerial to communicate with the MSP430FR5994.
Thanks!