Other Parts Discussed in Thread: MSP430F249
Tool/software: Code Composer Studio
Gentlemen,
TMS430F249 was not accepted in the Part Number field above???
I am attempting to set up Timer A0 as an up counter to 480 but the CPU never gets to the ISR. It traps to:
;******************************************************************************
;* ISR_TRAP.ASM - *
;* *
;* Copyright (c) 2003 Texas Instruments Incorporated *
;* http://www.ti.com/ *
;* *
;* Redistribution and use in source and binary forms, with or without *
;* modification, are permitted provided that the following conditions *
;* are met: *
;* *
;* Redistributions of source code must retain the above copyright *
;* notice, this list of conditions and the following disclaimer. *
;* *
;* Redistributions in binary form must reproduce the above copyright *
;* notice, this list of conditions and the following disclaimer in *
;* the documentation and/or other materials provided with the *
;* distribution. *
;* *
;* Neither the name of Texas Instruments Incorporated nor the names *
;* of its contributors may be used to endorse or promote products *
;* derived from this software without specific prior written *
;* permission. *
;* *
;* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS *
;* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT *
;* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR *
;* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT *
;* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, *
;* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT *
;* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, *
;* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY *
;* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT *
;* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE *
;* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. *
;* *
;******************************************************************************
;-----------------------------------------------------------------------------
;-- default ISR handler if user does not supply
;-- simply puts device into lpm0
;-----------------------------------------------------------------------------
.sect ".text:_isr:__TI_ISR_TRAP"
.align 2
.global __TI_ISR_TRAP
__TI_ISR_TRAP:
BIS.W #(0x0010),SR
JMP __TI_ISR_TRAP
NOP ; CPU40 Compatibility NOP
My setup:
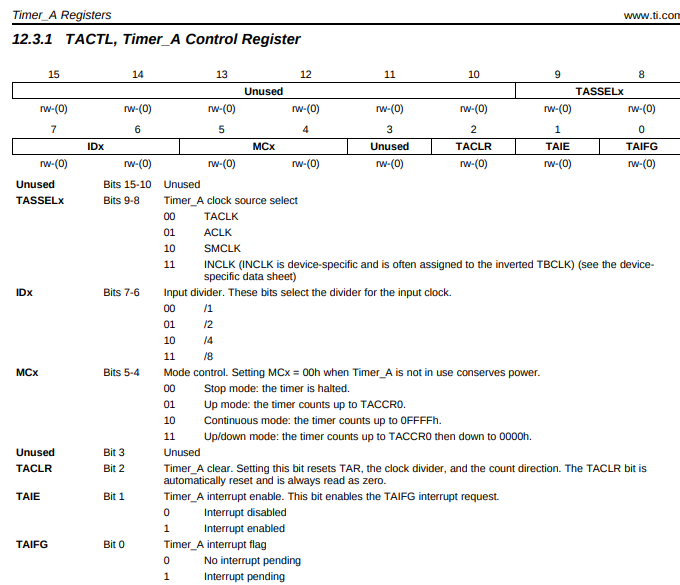
// Timer A0 Initialization.
TACTL = MC_0; // Shut down Timer A0.
TACTL = TASSEL_1; // Select ACLK as clock source and divide by 1.
TACCR0 = 480; // Set compare register for ~ 30 usec.
TACTL |= TAIE; // Timer A interrupt enable.
TACTL |= MC_1; // Set timer A to up counting mode.
My ISR:
/*********************************************************************************************
* NAME: evTMR_A0_isr
*
* DESCRIPTION: Timer A0 interrupt processor.
* Read the next byte from the C3_PM.
* SMBus_Buffer - each byte from the C3 is built bit by bit in this memory location.
* The timer A0 interrupt flag is also cleared just prior to exit.
*
*********************************************************************************************/
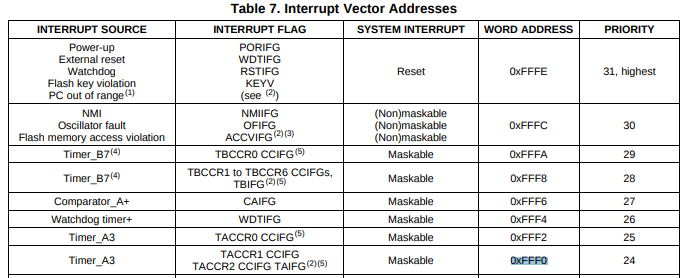
#pragma vector = TIMERA0_VECTOR
__interrupt void evTMR_A0_isr(void)
{
// Scope trigger
P1OUT &= ~M_LED4; // Turn on M_LED4.
if( C3_BYTE_READ == ( C3_BYTE_READ & SMBus_Flags ) ) {
Port_Five_Snapshot = P5IN; // Snapshot of SMBus comm port with the C3_PM Card.
switch(C3_Byte_Rd_State) // ***** Beginning of C3 Byte Read State Machine *****
{
case C3_Byte_Init:
if( nM_SCL & ~Port_Five_Snapshot ) { // If the clock line has gone low then...
bit_position = 8; // Initialze the bit counter.
C3_Byte_Rd_State = C3_Byte_Wait1;
}
break;
case C3_Byte_Wait1:
if( nM_SCL & Port_Five_Snapshot ) { // If valid data bit has been sent...
if(nM_SDA & Port_Five_Snapshot) { SMBus_Buffer |= 0x01; } // If SMBdata is a 1, OR a 1 into data byte LSB...
else { SMBus_Buffer &= 0xFE; } // otherwise clear the LSB.
bit_position--; // Decrement the bit count.
C3_Byte_Rd_State = C3_Byte_Wait2;
}
break;
case C3_Byte_Wait2: // Wait here for the clock line to go low.
if( nM_SCL & ~Port_Five_Snapshot ) {
if(bit_position > 0 ) { // If there are more bits in the byte to collect then...
SMBus_Buffer <<= 1; // Shift the bit just received toward the MSbit.
C3_Byte_Rd_State = C3_Byte_Wait1; // Go read the next bit.
}
// Acknowledge receipt of the last data bit. Pull data line low.
else{
SMBdata_Clr_C3;
C3_Byte_Rd_State = C3_Byte_Ack1; }
}
break;
case C3_Byte_Ack1: // Wait for the SMBus clock to go high.
if( nM_SCL & Port_Five_Snapshot ) {
C3_Byte_Rd_State = C3_Byte_Ack2;
}
break;
case C3_Byte_Ack2: // Wait for the SMBus clock to go low to complete the acknowledge.
if( nM_SCL & ~Port_Five_Snapshot ) { // If clock has gone low, terminate acknowledge.
SMBdata_Set_C3; // Release the SMBus data line to be pulled high.
SMBus_Flags &= ~C3_BYTE_READ; // Shut down the C3 Card byte read state machine.
C3_Byte_Rd_State = C3_Byte_Init; // Rearm state machine.
}
break;
} // Endcase C3 Card byte read.
} // Endif C3_BYTE_READ
// ????? TAIFG &= ~BIT0; // Clear the interrupt flag.
TA0R = 0; // Restart counter.
// Scope trigger
P1OUT |= M_LED4; // Turn off M_LED4.
}
Please advise.
Regards, Harvey Novak