



Tool/software: Code Composer Studio
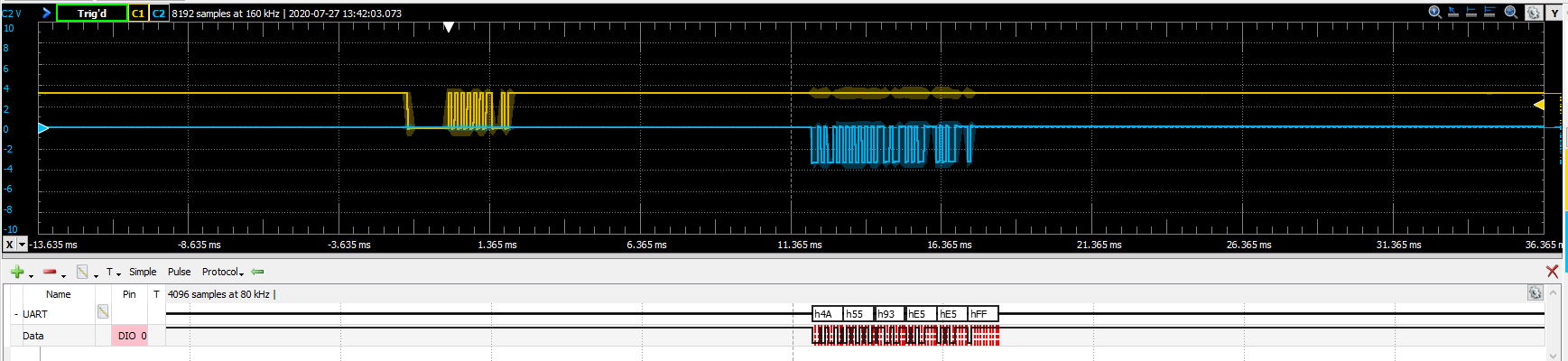
I have implemented automatic baudrate detection on my MSP430. It is working as expected however when I go from reading in the synch frame to transmitting data, the last byte of data that I send never transmits and the byte before that is also sent as a 0xFF.
Something I noticed was that when I enter debug mode everything sends perfectly, however when I just flash my program onto the MSP430 and use an oscilloscope it doesn't send the right data.
Here is my oscilloscope reading:
Here is the code that I write:
LIN_Read_Header(); LIN_Wait(); LIN_Send_Data(0x4A); //Whatever data you want to sent LIN_Send_Data(0x55); LIN_Send_Data(0x93); LIN_Send_Data(0xE5); LIN_Send_Data(0xE5); LIN_Send_Data(0xE5); LIN_CRC();
void LIN_Send_Data(volatile unsigned char data){
CRC_SUM=(CRC_SUM+data); // Keep a running sum of all the DATA
CRC_SUM=(CRC_SUM&255)+(CRC_SUM>>8);
while(!(UCA0IFG & UCTXIFG));
UCA0TXBUF=data;
}
void LIN_CRC(){
CRC_SUM=(~CRC_SUM) & 255;
while(!(UCA0IFG & UCTXIFG));
UCA0TXBUF=CRC_SUM;
CRC_SUM=0;
}
