Part Number: MSP432P401R
Hello,
As a part of my senior design project, I am trying to drive an I2C PWM LED Driver (PCA9685 from NXP Sem, DataSheet attached). To test I understand the I2C protocol, I am just trying to turn on 1 LED channel by writing a value to a control register and reading that value back. PCA9685.pdf
Here is my code.
/* --COPYRIGHT--,BSD
* Copyright (c) 2017, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
/******************************************************************************
* MSP432P4 I2C - EUSCI_B0 I2C Master TX/RX bytes to PCA9685A Slave-Repeated Start
*
* Description: This demo connects two MSP432's via the I2C bus. This is the
* MASTER CODE.The master transmits 2B to the slave, then receives a byte.
* The master transmits two bytes to the slave followed by a
* repeated start and a single-byte read from the slave.
* This is a common operation for bytes from I2C slave devices such as EEPROMs.
* The transaction for the I2C that is written looks as follows:
* ________________________________________________________
* | Start | WData | WData | Start | RData | |
* | 0x48 Addr | 0x007 | 0x013 |0x48 Addr | 0x13 | Stop |
* | W | | | R | | |
* |___________|_______|_______|__________|________|_______|
*
* ACLK = n/a, MCLK = HSMCLK = SMCLK = BRCLK = default DCO = ~3.0MHz
*
* /|\ /|\
* PCA9685 10k 10k MSP432P401R
* slave | | master
* ----------------- | | -----------------
* | P27/SDA|<-|----+->|P6.4/UCB1SDA |
* | | | | |
* | | | | |
* | P26/SCL|<-+------>|P6.5/UCB1SCL |
* | | | P2.7|-- Error
* | | | P2.6|-- Activity
*
*****************************************************************************/
/* DriverLib Defines */
#include <ti/devices/msp432p4xx/driverlib/driverlib.h>
/* Standard Defines */
#include <stdint.h>
#include <stdbool.h>
#include <string.h>
/* Slave Address for I2C Slave */
#define SLAVE_ADDRESS 0x48
#define NUM_OF_REC_BYTES 1
/* Variables */
const uint8_t TXData[] = {0x013,0x007};
static uint8_t RXData;
/* I2C Master Configuration Parameter */
const eUSCI_I2C_MasterConfig i2cConfig =
{
EUSCI_B_I2C_CLOCKSOURCE_SMCLK, // SMCLK Clock Source
3000000, // SMCLK = 3MHz (default)
EUSCI_B_I2C_SET_DATA_RATE_100KBPS, // Desired I2C Clock of 100khz
0, // No byte counter threshold
EUSCI_B_I2C_NO_AUTO_STOP // No Autostop
};
int main(void)
{
/* Disabling the Watchdog */
MAP_WDT_A_holdTimer();
/* Select Port 6 for I2C - Set Pin 4, 5 to input Primary Module Function,
* (UCB0SIMO/UCB0SDA, UCB0SOMI/UCB0SCL).
*/
MAP_GPIO_setAsPeripheralModuleFunctionInputPin(GPIO_PORT_P6,
GPIO_PIN5 + GPIO_PIN4, GPIO_PRIMARY_MODULE_FUNCTION);
MAP_GPIO_setAsOutputPin(GPIO_PORT_P2, GPIO_PIN7);
MAP_GPIO_setOutputLowOnPin(GPIO_PORT_P2, GPIO_PIN7);
MAP_GPIO_setAsOutputPin(GPIO_PORT_P2, GPIO_PIN6);
MAP_GPIO_setOutputLowOnPin(GPIO_PORT_P2, GPIO_PIN6);
/* Initializing I2C Master to SMCLK at 100khz with no autostop */
MAP_I2C_initMaster(EUSCI_B1_BASE, &i2cConfig);
/* Specify slave address */
MAP_I2C_setSlaveAddress(EUSCI_B1_BASE, SLAVE_ADDRESS);
/* Enable I2C Module to start operations */
MAP_I2C_enableModule(EUSCI_B1_BASE);
MAP_Interrupt_enableInterrupt(INT_EUSCIB1);
// enable RX interrupts
MAP_I2C_enableInterrupt(EUSCI_B1_BASE, EUSCI_B_I2C_RECEIVE_INTERRUPT1);
while (1)
{
RXData=0;
/* Making sure the last transaction has been completely sent out */
while (MAP_I2C_masterIsStopSent(EUSCI_B1_BASE));
/* Send out EEPROM Mock Read Cmd (2 databytes) */
MAP_I2C_masterSendMultiByteStart(EUSCI_B1_BASE, TXData[1]); // Start + 1Byte
MAP_I2C_masterSendMultiByteNext(EUSCI_B1_BASE, TXData[0]); // Poll for TXINT,Send 1Byte
/*---------------------------------------------*/
/* Now we need to initiate the read */
/* Wait until 2nd Byte has been output to shift register */
while(!(EUSCI_B1->IFG & EUSCI_B_IFG_TXIFG0));
// Send the restart condition, read one byte, send the stop condition right away
EUSCI_B1->CTLW0 &= ~(EUSCI_B_CTLW0_TR);
EUSCI_B1->CTLW0 |= EUSCI_B_CTLW0_TXSTT;
while(MAP_I2C_masterIsStartSent(EUSCI_B1_BASE));
EUSCI_B1->CTLW0 |= EUSCI_B_CTLW0_TXSTP;
//while(!(EUSCI_B1->IFG & EUSCI_B_IFG_RXIFG0));
//RXData = EUSCI_B0->RXBUF;
//---------------------------------
//MAP_PCM_gotoLPM0InterruptSafe();
// Slave should send a single 0x13 back
if(RXData != 0x13){
// Error- set P2.7 high
MAP_GPIO_setOutputHighOnPin(GPIO_PORT_P2, GPIO_PIN7);
while(1);
}
__delay_cycles(300000); // ~100ms pause between transmissions
}
}
/*******************************************************************************
* eUSCIB0 ISR. The repeated start and transmit/receive operations happen
* within this ISR.
*******************************************************************************/
void EUSCIB0_IRQHandler(void)
{
uint_fast16_t status;
status = MAP_I2C_getEnabledInterruptStatus(EUSCI_B1_BASE);
/* Receives bytes into the receive buffer. If we have received all bytes,
* send a STOP condition */
if (status & EUSCI_B_I2C_RECEIVE_INTERRUPT1)
{
// One-byte Read
RXData = MAP_I2C_masterReceiveSingle(EUSCI_B1_BASE);
MAP_GPIO_toggleOutputOnPin(GPIO_PORT_P2, GPIO_PIN6);
}
}
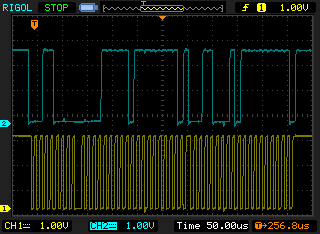
I am trying to troubleshoot by probing the interface signals with an oscilloscope, but I am unable to confirm my read or write.
Thanks so much.