Tool/software: Code Composer Studio
Dear sir,
Part number : MSP430F67791A.
Baud rate : 250kbps
Code : My own code generated from EMDC (default code is not available in MSP430F67791A MCU)
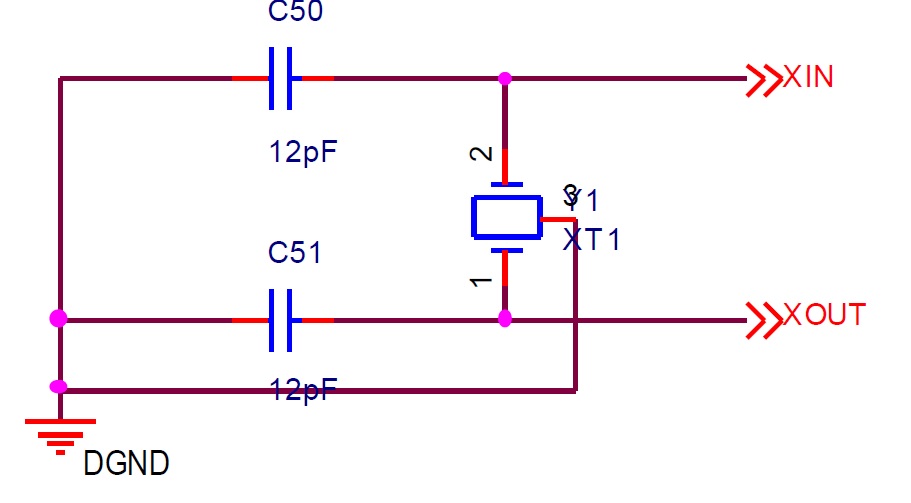
XTAL : 32.768KHz interface to Pin 1 & Pin 2 in MSP430F67791A
Compiller : CCS
I am trying to read data from EMDC generated code but it is not functioning. I tried to debug mode,
debugger is stopped Xtal initialisation line in ucs.c file (bellow attached that image)
Uart code is working without EMDC (only uart code)
default uart code ( msp430f677xA_uscia0_uart_03.c ) is not working but I changed below xtal initialisation. Then uart works well.
P1DIR |= BIT2; // ACLK set out to pin
P1SEL0 |= BIT2; // P1.2 for debugging purposes.
P1SEL0 |= BIT2; // P1.2 for debugging purposes.
// Setup LFXT1
UCSCTL6 &= ~(XT1OFF); // XT1 On
UCSCTL6 |= XCAP_3; // Internal load cap
UCSCTL6 &= ~(XT1OFF); // XT1 On
UCSCTL6 |= XCAP_3; // Internal load cap
UCSCTL6 &= ~(XT1DRIVE_3); // XT1 stable, reduce drive strength
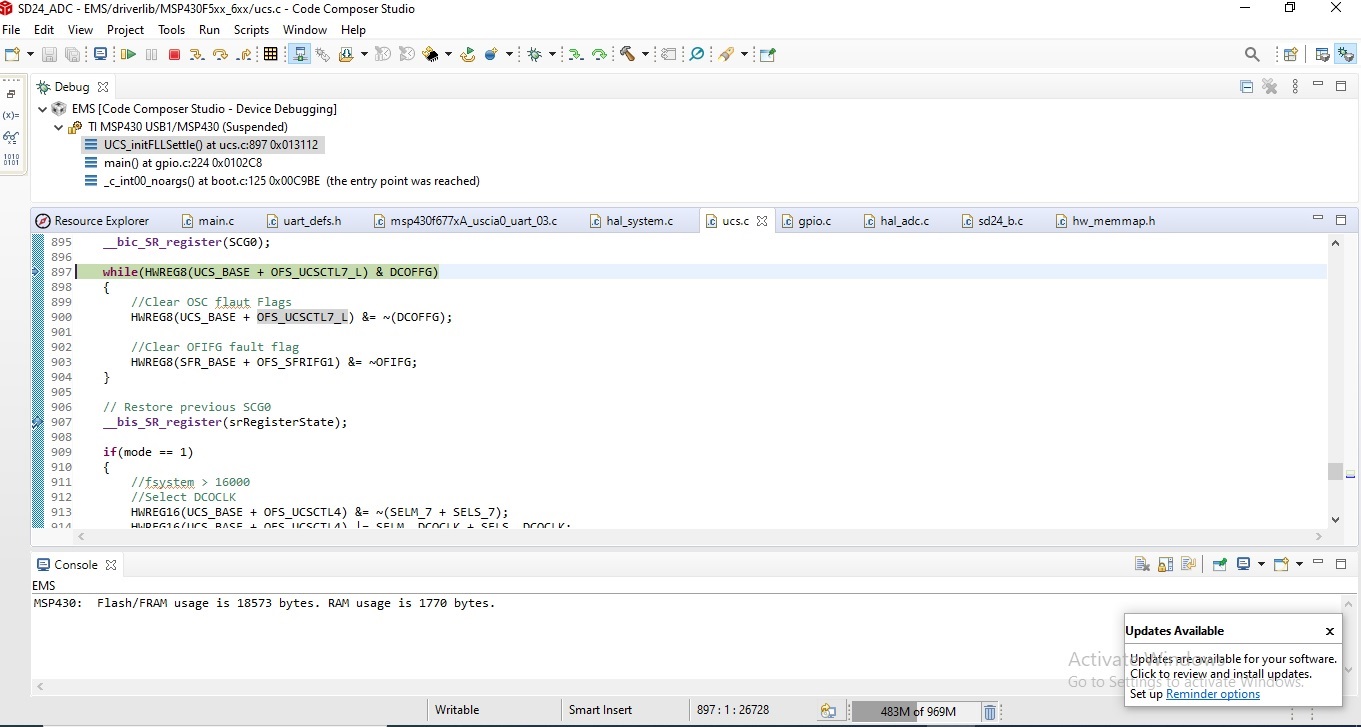
Generated EMDC Code is stopped in Xtal initialization part,
file name : ucs.c
when debug the code is stopped below loop. how to change this initialization part?
while(HWREG8(UCS_BASE + OFS_UCSCTL7_L) & DCOFFG)
{
//Clear OSC flaut Flags
HWREG8(UCS_BASE + OFS_UCSCTL7_L) &= ~(DCOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
{
//Clear OSC flaut Flags
HWREG8(UCS_BASE + OFS_UCSCTL7_L) &= ~(DCOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
I want to read data from EMDC. I am using these commands (0x55, 0XAA, 0X07, 0x04, 0X02, 0X00, 0X05, 0X00, 0X0B, 0X00) sent through uart and read all Parameters.
below attached my uart working code and EMDC Code. Please test and reply to me.
UART CODE
#include <msp430.h>
void delay(unsigned int j)
{
unsigned int i;
for(i=0; i<=j; i++)
{
__delay_cycles(50000); __delay_cycles(50000);
}
}
void UART_init()
{
// Setup P3.0 UCA0RXD, P3.1 UCA0TXD
P3SEL0 |= BIT0 | BIT1; // Set P3.0, P3.1 to non-IO
P3DIR |= BIT0 | BIT1; // Enable UCA0RXD, UCA0TXD
P1DIR |= BIT2; // ACLK set out to pin
P1SEL0 |= BIT2; // P1.2 for debugging purposes.
// Setup LFXT1
UCSCTL6 &= ~(XT1OFF); // XT1 On
UCSCTL6 |= XCAP_3; // Internal load cap
// Setup eUSCI_A0
UCA0CTLW0 |= UCSWRST; // **Put state machine in reset**
UCA0CTLW0 |= UCSSEL_1; // CLK = ACLK
UCA0BRW_L = 0x03; // 32kHz/9600=3.41 (see User's Guide)
UCA0BRW_H = 0x00; //
UCA0MCTLW = 0x5300; // Modulation UCBRSx=0x53, UCBRFx=0
UCA0CTLW0 &= ~UCSWRST; // **Initialize USCI state machine**
// UCA0IE |= UCRXIE; // Enable USCI_A0 RX interrupt
}
void UART_Tx(unsigned char a)
{
while (!(UCA0IFG & UCTXIFG)); // USCI_A0 TX buffer ready?
UCA0TXBUF = a;
}
unsigned char UART_Rx()
{
unsigned char rx;
rx = UCA0RXBUF;
while (!(UCA0IFG & UCRXIFG)); // USCI_A0 TX buffer ready?
return rx;
}
void UART_Str(unsigned char *a)
{
while(*a!='\0')
{
UART_Tx(*a);
a++;
}
}
void main(void)
{
unsigned char read;
WDTCTL = WDTPW | WDTHOLD; // Stop WDT
UART_init();
while(1)
{
UART_Str("EMDC...");
}
}
ucs.c file ERROR
EMDC main & ucs.c file code
#include <stdint.h>
#include "hal.h"
#include "hmi.h"
#include "EMLibGUIApp.h"
#include "EM_userConfig.h"
/*** FUNCTIONS ***/
static void MSP_GUI_System_setup(void);
//*****************************************************************************
//
//! In this software main will call a few initialization routines and then it
//! will jump to the main loop for the Energy Measurement Library.
//!
//! \return none
//
// *****************************************************************************
void main(void)
{
MSP_GUI_System_setup();
// Initialize the EM Lib to default settings and start conversions
EMLibGUIApp_Init();
// This is the Design Centers Main Loop
EMLibGUIApp_Engine();
}
//*****************************************************************************
//
//! This Function Initializes all the ports on the MCU
//!
//! \return none
//
// *****************************************************************************
static void MSP_GUI_System_setup(void)
{
// Stop WDT
WDTCTL = WDTPW + WDTHOLD;
// Initializes the basic functionality of the system
hal_system_Init();
// Initialize interfaces to user including GUI
HMI_Init();
}
#include "inc/hw_memmap.h"
#if defined(__MSP430_HAS_UCS__) || defined(__MSP430_HAS_UCS_RF__)
#include "ucs.h"
#include <assert.h>
#ifdef __GNUC__
#define __delay_cycles(x) \
({ \
volatile unsigned int j; \
for(j = 0; j < x; j++) \
{ \
__no_operation(); \
} \
})
#endif
#define CC430_DEVICE (defined (__CC430F5133__) || defined(__CC430F5135__) || \
defined(__CC430F5137__) || \
defined(__CC430F6125__) || defined(__CC430F6126__) || \
defined(__CC430F6127__) || \
defined(__CC430F6135__) || defined(__CC430F6137__) || \
defined(__CC430F5123__) || \
defined(__CC430F5125__) || defined(__CC430F5143__) || \
defined(__CC430F5145__) || \
defined(__CC430F5147__) || defined(__CC430F6143__) || \
defined(__CC430F6145__) || \
defined(__CC430F6147__))
#define NOT_CC430_DEVICE (!defined (__CC430F5133__) && \
!defined(__CC430F5135__) && \
!defined(__CC430F5137__) && \
!defined(__CC430F6125__) && \
!defined(__CC430F6126__) && \
!defined(__CC430F6127__) && \
!defined(__CC430F6135__) && \
!defined(__CC430F6137__) && \
!defined(__CC430F5123__) && \
!defined(__CC430F5125__) && \
!defined(__CC430F5143__) && \
!defined(__CC430F5145__) && \
!defined(__CC430F5147__) && \
!defined(__CC430F6143__) && \
!defined(__CC430F6145__) && \
!defined(__CC430F6147__))
//******************************************************************************
//
// The XT1 crystal frequency. Should be set with
// UCS_setExternalClockSource if XT1 is used and user intends to
// invoke UCS_getSMCLK, UCS_getMCLK or UCS_getACLK
//
//******************************************************************************
static uint32_t privateXT1ClockFrequency = 0;
//******************************************************************************
//
// The XT2 crystal frequency. Should be set with
// UCS_setExternalClockSource if XT1 is used and user intends to invoke
// UCS_getSMCLK, UCS_getMCLK or UCS_getACLK
//
//******************************************************************************
static uint32_t privateXT2ClockFrequency = 0;
static uint32_t privateUCSSourceClockFromDCO(uint16_t FLLRefCLKSource)
{
assert((SELM__DCOCLKDIV == FLLRefCLKSource) ||
(SELM__DCOCLK == FLLRefCLKSource)
);
uint16_t D_value = 1;
uint16_t N_value;
uint16_t n_value = 1;
uint32_t Fref_value;
uint8_t i;
N_value = (HWREG16(UCS_BASE + OFS_UCSCTL2)) & 0x03FF;
uint16_t tempDivider = HWREG8(UCS_BASE + OFS_UCSCTL3) & FLLREFDIV_7;
if(tempDivider < 4)
{
n_value <<= tempDivider;
}
else if(tempDivider == 4)
{
n_value = 12;
}
else if(tempDivider == 5)
{
n_value = 16;
}
switch((HWREG8(UCS_BASE + OFS_UCSCTL3)) & SELREF_7)
{
case SELREF__XT1CLK:
Fref_value = privateXT1ClockFrequency;
if(XTS != (HWREG16(UCS_BASE + OFS_UCSCTL6) & XTS))
{
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT1LFOFFG)
{
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1LFOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT1LFOFFG)
{
Fref_value = UCS_REFOCLK_FREQUENCY;
}
}
}
else
{
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT1HFOFFG)
{
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1HFOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT1HFOFFG)
{
Fref_value = UCS_REFOCLK_FREQUENCY;
}
}
}
break;
case SELREF__REFOCLK:
Fref_value = UCS_REFOCLK_FREQUENCY;
break;
case SELREF__XT2CLK:
Fref_value = privateXT2ClockFrequency;
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT2OFFG)
{
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT2OFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT2OFFG)
{
Fref_value = UCS_REFOCLK_FREQUENCY;
}
}
break;
default: assert(0);
}
uint32_t CLKFrequency = Fref_value * (N_value + 1) / n_value;
if(SELM__DCOCLK == FLLRefCLKSource)
{
tempDivider = (HWREG16(UCS_BASE + OFS_UCSCTL2)) & FLLD_7;
tempDivider = tempDivider >> 12;
for(i = 0; i < tempDivider; i++)
{
D_value = D_value * 2;
}
CLKFrequency *= D_value;
}
return (CLKFrequency);
}
static uint32_t privateUCSComputeCLKFrequency(uint16_t CLKSource,
uint16_t CLKSourceDivider)
{
uint32_t CLKFrequency;
uint8_t CLKSourceFrequencyDivider = 1;
uint8_t i = 0;
for(i = 0; i < CLKSourceDivider; i++)
{
CLKSourceFrequencyDivider *= 2;
}
switch(CLKSource)
{
case SELM__XT1CLK:
CLKFrequency = (privateXT1ClockFrequency /
CLKSourceFrequencyDivider);
if(XTS != (HWREG16(UCS_BASE + OFS_UCSCTL6) & XTS))
{
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT1LFOFFG)
{
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1LFOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT1LFOFFG)
{
CLKFrequency = UCS_REFOCLK_FREQUENCY;
}
}
}
else
{
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT1HFOFFG)
{
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1HFOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT1HFOFFG)
{
CLKFrequency = UCS_REFOCLK_FREQUENCY;
}
}
}
break;
case SELM__VLOCLK:
CLKFrequency =
(UCS_VLOCLK_FREQUENCY / CLKSourceFrequencyDivider);
break;
case SELM__REFOCLK:
CLKFrequency =
(UCS_REFOCLK_FREQUENCY / CLKSourceFrequencyDivider);
break;
case SELM__XT2CLK:
CLKFrequency =
(privateXT2ClockFrequency / CLKSourceFrequencyDivider);
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT2OFFG)
{
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~XT2OFFG;
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
if(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT2OFFG)
{
CLKFrequency =
privateUCSSourceClockFromDCO(SELM__DCOCLKDIV);
}
break;
case SELM__DCOCLK:
case SELM__DCOCLKDIV:
CLKFrequency = privateUCSSourceClockFromDCO(
CLKSource) / CLKSourceFrequencyDivider;
break;
}
return (CLKFrequency);
}
void UCS_setExternalClockSource(uint32_t XT1CLK_frequency,
uint32_t XT2CLK_frequency)
{
privateXT1ClockFrequency = XT1CLK_frequency;
privateXT2ClockFrequency = XT2CLK_frequency;
}
void UCS_initClockSignal(uint8_t selectedClockSignal,
uint16_t clockSource,
uint16_t clockSourceDivider)
{
assert(
(UCS_XT1CLK_SELECT == clockSource) ||
(UCS_VLOCLK_SELECT == clockSource) ||
(UCS_REFOCLK_SELECT == clockSource) ||
(UCS_DCOCLK_SELECT == clockSource) ||
(UCS_DCOCLKDIV_SELECT == clockSource) ||
(UCS_XT2CLK_SELECT == clockSource)
);
assert(
(UCS_CLOCK_DIVIDER_1 == clockSourceDivider) ||
(UCS_CLOCK_DIVIDER_2 == clockSourceDivider) ||
(UCS_CLOCK_DIVIDER_4 == clockSourceDivider) ||
(UCS_CLOCK_DIVIDER_8 == clockSourceDivider) ||
(UCS_CLOCK_DIVIDER_16 == clockSourceDivider) ||
(UCS_CLOCK_DIVIDER_32 == clockSourceDivider)
);
uint16_t temp = HWREG16(UCS_BASE + OFS_UCSCTL5);
switch(selectedClockSignal)
{
case UCS_ACLK:
HWREG16(UCS_BASE + OFS_UCSCTL4) &= ~(SELA_7);
clockSource = clockSource << 8;
HWREG16(UCS_BASE + OFS_UCSCTL4) |= (clockSource);
clockSourceDivider = clockSourceDivider << 8;
HWREG16(UCS_BASE + OFS_UCSCTL5) = temp & ~(DIVA_7) | clockSourceDivider;
break;
case UCS_SMCLK:
HWREG16(UCS_BASE + OFS_UCSCTL4) &= ~(SELS_7);
clockSource = clockSource << 4;
HWREG16(UCS_BASE + OFS_UCSCTL4) |= (clockSource);
clockSourceDivider = clockSourceDivider << 4;
HWREG16(UCS_BASE + OFS_UCSCTL5) = temp & ~(DIVS_7) | clockSourceDivider;
break;
case UCS_MCLK:
HWREG16(UCS_BASE + OFS_UCSCTL4) &= ~(SELM_7);
HWREG16(UCS_BASE + OFS_UCSCTL4) |= (clockSource);
HWREG16(UCS_BASE + OFS_UCSCTL5) = temp & ~(DIVM_7) | clockSourceDivider;
break;
case UCS_FLLREF:
assert(clockSource <= SELA_5);
HWREG8(UCS_BASE + OFS_UCSCTL3) &= ~(SELREF_7);
clockSource = clockSource << 4;
HWREG8(UCS_BASE + OFS_UCSCTL3) |= (clockSource);
temp = HWREG8(UCS_BASE + OFS_UCSCTL3) & 0x00FF;
//Note that dividers for FLLREF are slightly different
//Hence handled differently from other CLK signals
switch(clockSourceDivider)
{
case UCS_CLOCK_DIVIDER_12:
HWREG8(UCS_BASE +
OFS_UCSCTL3) = temp & ~(FLLREFDIV_7) | FLLREFDIV__12;
break;
case UCS_CLOCK_DIVIDER_16:
HWREG8(UCS_BASE +
OFS_UCSCTL3) = temp & ~(FLLREFDIV_7) | FLLREFDIV__16;
break;
default:
HWREG8(UCS_BASE +
OFS_UCSCTL3) = temp & ~(FLLREFDIV_7) | clockSourceDivider;
break;
}
break;
}
}
void UCS_turnOnLFXT1(uint16_t xt1drive,
uint8_t xcap)
{
assert((xcap == UCS_XCAP_0) ||
(xcap == UCS_XCAP_1) ||
(xcap == UCS_XCAP_2) ||
(xcap == UCS_XCAP_3));
assert((xt1drive == UCS_XT1_DRIVE_0) ||
(xt1drive == UCS_XT1_DRIVE_1) ||
(xt1drive == UCS_XT1_DRIVE_2) ||
(xt1drive == UCS_XT1_DRIVE_3));
//Switch ON XT1 oscillator
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT1OFF;
//Highest drive setting for XT1startup
HWREG16(UCS_BASE + OFS_UCSCTL6_L) |= XT1DRIVE1_L + XT1DRIVE0_L;
//Enable LF mode and clear xcap and bypass
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~(XTS + XCAP_3 + XT1BYPASS);
HWREG16(UCS_BASE + OFS_UCSCTL6) |= xcap;
while(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT1LFOFFG)
{
//Clear OSC flaut Flags fault flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1LFOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
//set requested Drive mode
HWREG16(UCS_BASE + OFS_UCSCTL6) = (HWREG16(UCS_BASE + OFS_UCSCTL6) &
~(XT1DRIVE_3)
) |
(xt1drive);
}
void UCS_turnOnHFXT1(uint16_t xt1drive)
{
//Switch ON XT1 oscillator
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT1OFF;
//Check if drive value is the expected one
if((HWREG16(UCS_BASE + OFS_UCSCTL6) & XT1DRIVE_3) != xt1drive)
{
//Clear XT1drive field
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT1DRIVE_3;
//Set requested value
HWREG16(UCS_BASE + OFS_UCSCTL6) |= xt1drive;
}
//Enable HF mode
HWREG16(UCS_BASE + OFS_UCSCTL6) |= XTS;
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT1BYPASS;
// Check XT1 fault flags
while((HWREG8(UCS_BASE + OFS_UCSCTL7) & (XT1HFOFFG)))
{
//Clear OSC flaut Flags fault flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1HFOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
}
void UCS_bypassXT1(uint8_t highOrLowFrequency)
{
assert((UCS_XT1_LOW_FREQUENCY == highOrLowFrequency) ||
(UCS_XT1_HIGH_FREQUENCY == highOrLowFrequency)
);
//Enable HF/LF mode
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XTS;
HWREG16(UCS_BASE + OFS_UCSCTL6) |= highOrLowFrequency;
//Switch OFF XT1 oscillator and enable BYPASS mode
HWREG16(UCS_BASE + OFS_UCSCTL6) |= (XT1BYPASS + XT1OFF);
if(UCS_XT1_LOW_FREQUENCY == highOrLowFrequency)
{
while(HWREG8(UCS_BASE + OFS_UCSCTL7) & (XT1LFOFFG))
{
//Clear OSC flaut Flags fault flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1LFOFFG);
// Clear the global fault flag. In case the XT1 caused the global fault
// flag to get set this will clear the global error condition. If any
// error condition persists, global flag will get again.
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
}
else
{
while(HWREG8(UCS_BASE + OFS_UCSCTL7) & (XT1HFOFFG))
{
//Clear OSC flaut Flags fault flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1HFOFFG);
//Clear the global fault flag. In case the XT1 caused the global fault
//flag to get set this will clear the global error condition. If any
//error condition persists, global flag will get again.
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
}
}
bool UCS_turnOnLFXT1WithTimeout(uint16_t xt1drive,
uint8_t xcap,
uint16_t timeout)
{
assert((xcap == UCS_XCAP_0) ||
(xcap == UCS_XCAP_1) ||
(xcap == UCS_XCAP_2) ||
(xcap == UCS_XCAP_3));
assert((xt1drive == UCS_XT1_DRIVE_0) ||
(xt1drive == UCS_XT1_DRIVE_1) ||
(xt1drive == UCS_XT1_DRIVE_2) ||
(xt1drive == UCS_XT1_DRIVE_3));
assert(timeout > 0);
//Switch ON XT1 oscillator
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT1OFF;
//Highest drive setting for XT1startup
HWREG16(UCS_BASE + OFS_UCSCTL6_L) |= XT1DRIVE1_L + XT1DRIVE0_L;
//Enable LF mode and clear xcap and bypass
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~(XTS + XCAP_3 + XT1BYPASS);
HWREG16(UCS_BASE + OFS_UCSCTL6) |= xcap;
do
{
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1LFOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
while((HWREG8(UCS_BASE + OFS_UCSCTL7) & XT1LFOFFG) && --timeout);
if(timeout)
{
//set requested Drive mode
HWREG16(UCS_BASE + OFS_UCSCTL6) = (HWREG16(UCS_BASE + OFS_UCSCTL6) &
~(XT1DRIVE_3)
) |
(xt1drive);
return (STATUS_SUCCESS);
}
else
{
return (STATUS_FAIL);
}
}
bool UCS_turnOnHFXT1WithTimeout(uint16_t xt1drive,
uint16_t timeout)
{
assert((xt1drive == UCS_XT1_DRIVE_0) ||
(xt1drive == UCS_XT1_DRIVE_1) ||
(xt1drive == UCS_XT1_DRIVE_2) ||
(xt1drive == UCS_XT1_DRIVE_3));
assert(timeout > 0);
//Switch ON XT1 oscillator
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT1OFF;
//Check if drive value is the expected one
if((HWREG16(UCS_BASE + OFS_UCSCTL6) & XT1DRIVE_3) != xt1drive)
{
//Clear XT1drive field
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT1DRIVE_3;
//Set requested value
HWREG16(UCS_BASE + OFS_UCSCTL6) |= xt1drive;
}
//Enable HF mode
HWREG16(UCS_BASE + OFS_UCSCTL6) |= XTS;
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT1BYPASS;
// Check XT1 fault flags
do
{
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1HFOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
while((HWREG8(UCS_BASE + OFS_UCSCTL7) & (XT1HFOFFG))
&& --timeout);
if(timeout)
{
return (STATUS_SUCCESS);
}
else
{
return (STATUS_FAIL);
}
}
bool UCS_bypassXT1WithTimeout(uint8_t highOrLowFrequency,
uint16_t timeout)
{
assert((UCS_XT1_LOW_FREQUENCY == highOrLowFrequency) ||
(UCS_XT1_HIGH_FREQUENCY == highOrLowFrequency)
);
assert(timeout > 0);
//Enable HF/LF mode
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XTS;
HWREG16(UCS_BASE + OFS_UCSCTL6) |= highOrLowFrequency;
//Switch OFF XT1 oscillator and enable bypass
HWREG16(UCS_BASE + OFS_UCSCTL6) |= (XT1BYPASS + XT1OFF);
if(UCS_XT1_LOW_FREQUENCY == highOrLowFrequency)
{
do
{
//Clear OSC flaut Flags fault flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1LFOFFG);
// Clear the global fault flag. In case the XT1 caused the global fault
// flag to get set this will clear the global error condition. If any
// error condition persists, global flag will get again.
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
while((HWREG8(UCS_BASE + OFS_UCSCTL7) & (XT1LFOFFG)) && --timeout);
}
else
{
do
{
//Clear OSC flaut Flags fault flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT1HFOFFG);
//Clear the global fault flag. In case the XT1 caused the global fault
//flag to get set this will clear the global error condition. If any
//error condition persists, global flag will get again.
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
while((HWREG8(UCS_BASE + OFS_UCSCTL7) & (XT1HFOFFG))&& --timeout);
}
if(timeout)
{
return (STATUS_SUCCESS);
}
else
{
return (STATUS_FAIL);
}
}
void UCS_turnOffXT1(void)
{
//Switch off XT1 oscillator
HWREG16(UCS_BASE + OFS_UCSCTL6) |= XT1OFF;
}
void UCS_turnOnXT2(uint16_t xt2drive)
{
#if NOT_CC430_DEVICE
//Check if drive value is the expected one
if((HWREG16(UCS_BASE + OFS_UCSCTL6) & XT2DRIVE_3) != xt2drive)
{
//Clear XT2drive field
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT2DRIVE_3;
//Set requested value
HWREG16(UCS_BASE + OFS_UCSCTL6) |= xt2drive;
}
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT2BYPASS;
#endif
//Enable XT2 and Switch on XT2 oscillator
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT2OFF;
while(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT2OFFG)
{
//Clear OSC flaut Flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT2OFFG);
#if CC430_DEVICE
// CC430 uses a different fault mechanism. It requires 3 VLO clock
// cycles delay.If 20MHz CPU, 5000 clock cycles are required in worst
// case.
__delay_cycles(5000);
#endif
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
}
void UCS_bypassXT2(void)
{
//Switch on XT2 oscillator
#if NOT_CC430_DEVICE
HWREG16(UCS_BASE + OFS_UCSCTL6) |= XT2BYPASS;
#endif
HWREG16(UCS_BASE + OFS_UCSCTL6) |= XT2OFF;
while(HWREG8(UCS_BASE + OFS_UCSCTL7) & XT2OFFG)
{
//Clear OSC flaut Flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT2OFFG);
#if CC430_DEVICE
// CC430 uses a different fault mechanism. It requires 3 VLO clock
// cycles delay.If 20MHz CPU, 5000 clock cycles are required in worst
// case.
__delay_cycles(5000);
#endif
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
}
bool UCS_turnOnXT2WithTimeout(uint16_t xt2drive,
uint16_t timeout)
{
assert(timeout > 0);
#if NOT_CC430_DEVICE
//Check if drive value is the expected one
if((HWREG16(UCS_BASE + OFS_UCSCTL6) & XT2DRIVE_3) != xt2drive)
{
//Clear XT2drive field
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT2DRIVE_3;
//Set requested value
HWREG16(UCS_BASE + OFS_UCSCTL6) |= xt2drive;
}
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT2BYPASS;
#endif
//Switch on XT2 oscillator
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~XT2OFF;
do
{
//Clear OSC flaut Flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT2OFFG);
#if CC430_DEVICE
// CC430 uses a different fault mechanism. It requires 3 VLO clock
// cycles delay.If 20MHz CPU, 5000 clock cycles are required in worst
// case.
__delay_cycles(5000);
#endif
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
while((HWREG8(UCS_BASE + OFS_UCSCTL7) & XT2OFFG) && --timeout);
if(timeout)
{
return (STATUS_SUCCESS);
}
else
{
return (STATUS_FAIL);
}
}
bool UCS_bypassXT2WithTimeout(uint16_t timeout)
{
assert(timeout > 0);
//Switch off XT2 oscillator and enable BYPASS mode
#if NOT_CC430_DEVICE
HWREG16(UCS_BASE + OFS_UCSCTL6) |= XT2BYPASS;
#endif
HWREG16(UCS_BASE + OFS_UCSCTL6) |= XT2OFF;
do
{
//Clear OSC flaut Flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(XT2OFFG);
#if CC430_DEVICE
// CC430 uses a different fault mechanism. It requires 3 VLO clock
// cycles delay.If 20MHz CPU, 5000 clock cycles are required in worst
// case.
__delay_cycles(5000);
#endif
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
while((HWREG8(UCS_BASE + OFS_UCSCTL7) & XT2OFFG) && --timeout);
if(timeout)
{
return (STATUS_SUCCESS);
}
else
{
return (STATUS_FAIL);
}
}
void UCS_turnOffXT2(void)
{
//Switch off XT2 oscillator
HWREG16(UCS_BASE + OFS_UCSCTL6) |= XT2OFF;
}
void UCS_initFLLSettle(uint16_t fsystem,
uint16_t ratio)
{
volatile uint16_t x = ratio * 32;
UCS_initFLL(fsystem, ratio);
while(x--)
{
__delay_cycles(30);
}
}
void UCS_initFLL(uint16_t fsystem,
uint16_t ratio)
{
uint16_t d, dco_div_bits;
uint16_t mode = 0;
//Save actual state of FLL loop control, then disable it. This is needed to
//prevent the FLL from acting as we are making fundamental modifications to
//the clock setup.
uint16_t srRegisterState = __get_SR_register() & SCG0;
d = ratio;
//Have at least a divider of 2
dco_div_bits = FLLD__2;
if(fsystem > 16000)
{
d >>= 1;
mode = 1;
}
else
{
//fsystem = fsystem * 2
fsystem <<= 1;
}
while(d > 512)
{
//Set next higher div level
dco_div_bits = dco_div_bits + FLLD0;
d >>= 1;
}
// Disable FLL
__bis_SR_register(SCG0);
//Set DCO to lowest Tap
HWREG8(UCS_BASE + OFS_UCSCTL0_H) = 0x0000;
//Reset FN bits
HWREG16(UCS_BASE + OFS_UCSCTL2) &= ~(0x03FF);
HWREG16(UCS_BASE + OFS_UCSCTL2) = dco_div_bits | (d - 1);
if(fsystem <= 630) //fsystem < 0.63MHz
{
HWREG8(UCS_BASE + OFS_UCSCTL1) = DCORSEL_0;
}
else if(fsystem < 1250) //0.63MHz < fsystem < 1.25MHz
{
HWREG8(UCS_BASE + OFS_UCSCTL1) = DCORSEL_1;
}
else if(fsystem < 2500) //1.25MHz < fsystem < 2.5MHz
{
HWREG8(UCS_BASE + OFS_UCSCTL1) = DCORSEL_2;
}
else if(fsystem < 5000) //2.5MHz < fsystem < 5MHz
{
HWREG8(UCS_BASE + OFS_UCSCTL1) = DCORSEL_3;
}
else if(fsystem < 10000) //5MHz < fsystem < 10MHz
{
HWREG8(UCS_BASE + OFS_UCSCTL1) = DCORSEL_4;
}
else if(fsystem < 20000) //10MHz < fsystem < 20MHz
{
HWREG8(UCS_BASE + OFS_UCSCTL1) = DCORSEL_5;
}
else if(fsystem < 40000) //20MHz < fsystem < 40MHz
{
HWREG8(UCS_BASE + OFS_UCSCTL1) = DCORSEL_6;
}
else
{
HWREG8(UCS_BASE + OFS_UCSCTL1) = DCORSEL_7;
}
// Re-enable FLL
__bic_SR_register(SCG0);
while(HWREG8(UCS_BASE + OFS_UCSCTL7_L) & DCOFFG)
{
//Clear OSC flaut Flags
HWREG8(UCS_BASE + OFS_UCSCTL7_L) &= ~(DCOFFG);
//Clear OFIFG fault flag
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
}
// Restore previous SCG0
__bis_SR_register(srRegisterState);
if(mode == 1)
{
//fsystem > 16000
//Select DCOCLK
HWREG16(UCS_BASE + OFS_UCSCTL4) &= ~(SELM_7 + SELS_7);
HWREG16(UCS_BASE + OFS_UCSCTL4) |= SELM__DCOCLK + SELS__DCOCLK;
}
else
{
//Select DCODIVCLK
HWREG16(UCS_BASE + OFS_UCSCTL4) &= ~(SELM_7 + SELS_7);
HWREG16(UCS_BASE + OFS_UCSCTL4) |= SELM__DCOCLKDIV + SELS__DCOCLKDIV;
}
}
void UCS_enableClockRequest(uint8_t selectClock)
{
HWREG8(UCS_BASE + OFS_UCSCTL8) |= selectClock;
}
void UCS_disableClockRequest(uint8_t selectClock)
{
HWREG8(UCS_BASE + OFS_UCSCTL8) &= ~selectClock;
}
uint8_t UCS_getFaultFlagStatus(uint8_t mask)
{
assert(mask <= UCS_XT2OFFG);
return (HWREG8(UCS_BASE + OFS_UCSCTL7) & mask);
}
void UCS_clearFaultFlag(uint8_t mask)
{
assert(mask <= UCS_XT2OFFG);
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~mask;
}
void UCS_turnOffSMCLK(void)
{
HWREG16(UCS_BASE + OFS_UCSCTL6) |= SMCLKOFF;
}
void UCS_turnOnSMCLK(void)
{
HWREG16(UCS_BASE + OFS_UCSCTL6) &= ~SMCLKOFF;
}
uint32_t UCS_getACLK(void)
{
//Find ACLK source
uint16_t ACLKSource = (HWREG16(UCS_BASE + OFS_UCSCTL4) & SELA_7);
ACLKSource = ACLKSource >> 8;
uint16_t ACLKSourceDivider = HWREG16(UCS_BASE + OFS_UCSCTL5) & DIVA_7;
ACLKSourceDivider = ACLKSourceDivider >> 8;
return (privateUCSComputeCLKFrequency(
ACLKSource,
ACLKSourceDivider
));
}
uint32_t UCS_getSMCLK(void)
{
uint16_t SMCLKSource = HWREG8(UCS_BASE + OFS_UCSCTL4_L) & SELS_7;
SMCLKSource = SMCLKSource >> 4;
uint16_t SMCLKSourceDivider =
HWREG16(UCS_BASE + OFS_UCSCTL5) & DIVS_7;
SMCLKSourceDivider = SMCLKSourceDivider >> 4;
return (privateUCSComputeCLKFrequency(
SMCLKSource,
SMCLKSourceDivider)
);
}
uint32_t UCS_getMCLK(void)
{
//Find AMCLK source
uint16_t MCLKSource = (HWREG16(UCS_BASE + OFS_UCSCTL4) & SELM_7);
uint16_t MCLKSourceDivider = HWREG16(UCS_BASE + OFS_UCSCTL5) & DIVM_7;
return (privateUCSComputeCLKFrequency(
MCLKSource,
MCLKSourceDivider)
);
}
uint16_t UCS_clearAllOscFlagsWithTimeout(uint16_t timeout)
{
assert(timeout > 0);
do
{
// Clear all osc fault flags
HWREG8(UCS_BASE + OFS_UCSCTL7) &= ~(DCOFFG +
XT1LFOFFG +
XT1HFOFFG +
XT2OFFG
);
#if CC430_DEVICE
// CC430 uses a different fault mechanism. It requires 3 VLO clock
// cycles delay.If 20MHz CPU, 5000 clock cycles are required in worst
// case.
__delay_cycles(5000);
#endif
// Clear the global osc fault flag.
HWREG8(SFR_BASE + OFS_SFRIFG1) &= ~OFIFG;
// Check XT1 fault flags
}
while((HWREG8(SFR_BASE + OFS_SFRIFG1) & OFIFG) && --timeout);
return (HWREG8(UCS_BASE + OFS_UCSCTL7) & (DCOFFG +
XT1LFOFFG +
XT1HFOFFG +
XT2OFFG)
);
}
#endif
//*****************************************************************************
//
//! Close the doxygen group for ucs_api
//! @}
//
//*****************************************************************************