Other Parts Discussed in Thread: CC1352R,
Hello,
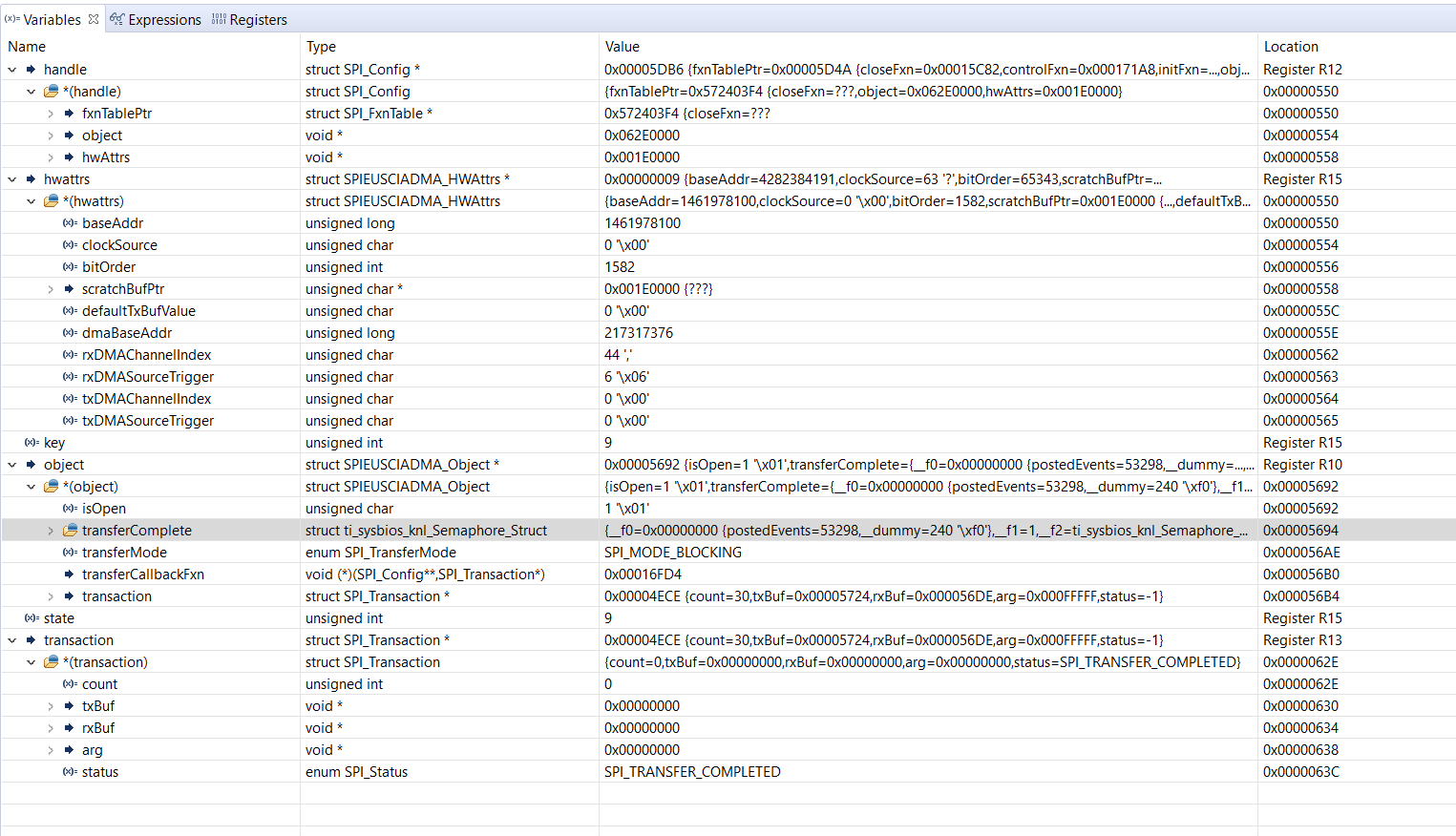
I am trying to have an SPI communication setup between MSP430FR5994 (Master) and CC1352R (Slave). I am trying to replicate the SPI example given in the TI Resource explorer/TI Drivers of CC1352R. The CC1352R master and slave example works for me on two CC1352R boards. Now, I want to replace the CC1352R master with the MSP430FR5994 master. And I think I have some configuration issues, I suspect halHwi1Params.arg = 3. My application stuck when the SPI_transfer is in progress.
Compiler version - 16.9.11.LTS
TI-RTOS version - 2.20.0.06
XDCTools version - 3.32.0.06_core
My configuration -
var halHwi0Params = new halHwi.Params(); halHwi0Params.arg = 0; halHwi0Params.instance.name = "halHwi0"; halHwi0Params.priority = 1; Program.global.halHwi0 = halHwi.create(48, "&UARTEUSCIA_hwiIntFxn", halHwi0Params); var halHwi1Params = new halHwi.Params(); halHwi1Params.instance.name = "halHwi1"; halHwi1Params.arg = 3; halHwi1Params.priority = 3; Program.global.halHwi1 = halHwi.create(24, "&MSP_EXP430FR5994_isrDMA", halHwi1Params); var halHwi2Params = new halHwi.Params(); halHwi2Params.arg = 4; halHwi2Params.priority = 5; Program.global.halHwi2 = halHwi.create(32, "&GPIO_hwiIntFxn", halHwi2Params);
And in msp430fr5994.c, MSP_EXP430FR5994_isrDMA looks like this
/*
* =============================== DMA ===============================
*/
/*
* ======== MSP_EXP430FR5994_isrDMA ========
* This is a application defined DMA ISR. This ISR must map and call the
* appropriate Driver_event(handle) API to indicate completed DMA transfers.
*/
Void MSP_EXP430FR5994_isrDMA(UArg arg)
{
/* Call the SPI DMA function, passing the SPI handle used for WiFi */
SPI_serviceISR((SPI_Handle) &(SPI_config[0]));
}
My SPI master tasks looks like this:
void spiMasterFxn(UArg arg0, UArg arg1) {
uint32_t i;
bool transferOK;
char uartStr[10];
/* Configure spi master and slave ready gpio pins */
GPIO_setConfig(CONFIG_SPI_MASTER_READY, GPIO_CFG_OUTPUT | GPIO_CFG_OUT_LOW);
GPIO_setConfig(CONFIG_SPI_SLAVE_READY, GPIO_CFG_INPUT);
/* Set master ready pin */
GPIO_write(CONFIG_SPI_MASTER_READY, 1);
UART_write(uart, "CONFIG_SPI_MASTER_READY\n", sizeof("CONFIG_SPI_MASTER_READY\n"));
/* Wait for slave to be ready */
while (GPIO_read(CONFIG_SPI_SLAVE_READY) == 0) {}
UART_write(uart, "handshake complete! \n", sizeof("handshake complete! \n"));
/* Handshake complete; now configure interrupt on CONFIG_SPI_SLAVE_READY */
GPIO_setConfig(CONFIG_SPI_SLAVE_READY, GPIO_CFG_IN_PU | GPIO_CFG_IN_INT_FALLING);
GPIO_setCallback(CONFIG_SPI_SLAVE_READY, slaveReadyFxn);
GPIO_enableInt(CONFIG_SPI_SLAVE_READY);
UART_write(uart, "configure interrupt on slave\n", sizeof("configure interrupt on slave\n"));
/* Create a semaphore; the master will wait on this semaphore
* until the slave is ready. */
Semaphore_Params params;
Error_Block eb;
/* Init params */
Semaphore_Params_init(¶ms);
Error_init(&eb);
/* Create semaphore instance */
masterSem = Semaphore_create(0, ¶ms, &eb);
if(masterSem == NULL)
{
System_printf("Semaphore creation failed");
System_flush();
}
/* Open SPI as master */
SPI_Params_init(&spiParams);
spiParams.frameFormat = SPI_POL0_PHA1;
spiParams.mode = SPI_MASTER;
spiParams.bitRate = 1000000;
masterSpi = SPI_open(Board_SPI0, &spiParams);
if (masterSpi == NULL) {
UART_write(uart, "Error initializing master SPI\n", sizeof("Error initializing master SPI\n"));
while (1);
}
else {
UART_write(uart, "Master SPI initialized\n", sizeof("Master SPI initialized\n"));
}
/*
* Master has opened CONFIG_SPI_MASTER; set CONFIG_SPI_MASTER_READY low to
* inform the slave.
*/
GPIO_write(CONFIG_SPI_MASTER_READY, 0);
/* Copy message to transmit buffer */
strncpy((char *) masterTxBuffer, MASTER_MSG, SPI_MSG_LENGTH);
for (i = 0; i < MAX_LOOP; i++) {
/*
* Wait until slave is ready for transfer; slave will pull
* CONFIG_SPI_SLAVE_READY low.
*/
UART_write(uart, "Waiting for master_sem\n", sizeof("Waiting for master_sem\n"));
Semaphore_pend(masterSem, BIOS_WAIT_FOREVER);
UART_write(uart, "Create transaction\n", sizeof("Create transaction\n"));
/* Initialize master SPI transaction structure */
masterTxBuffer[sizeof(MASTER_MSG) - 1] = (i % 10) + '0';
memset((void *) masterRxBuffer, 0, SPI_MSG_LENGTH);
transaction.count = SPI_MSG_LENGTH;
transaction.txBuf = (void *) masterTxBuffer;
transaction.rxBuf = (void *) masterRxBuffer;
/* Toggle user LED, indicating a SPI transfer is in progress */
UART_write(uart, "Transfer in progress\n", sizeof("Transfer in progress\n"));
GPIO_toggle(Board_LED1);
/* Perform SPI transfer */
transferOK = SPI_transfer(masterSpi, &transaction);
sprintf(uartStr, "%d", transferOK );
UART_write(uart, "transfer ok = ", sizeof("transfer ok = "));
UART_write(uart, uartStr, sizeof(uartStr));
if (transferOK) {
UART_write(uart, "\nMaster received\n", sizeof("Master received\n"));
}
else {
UART_write(uart, "\nUnsuccessful Master received\n", sizeof("Unsuccessful Master received\n"));
}
/* Sleep for a bit before starting the next SPI transfer */
Task_sleep(100);
}
SPI_close(masterSpi);
/* Example complete - set pins to a known state */
GPIO_disableInt(CONFIG_SPI_SLAVE_READY);
GPIO_setConfig(CONFIG_SPI_SLAVE_READY, GPIO_CFG_OUTPUT | GPIO_CFG_OUT_LOW);
GPIO_write(CONFIG_SPI_MASTER_READY, 0);
UART_write(uart, "Done!\n", sizeof("Done!\n"));
}
Let me know if you need more information. Thanks.