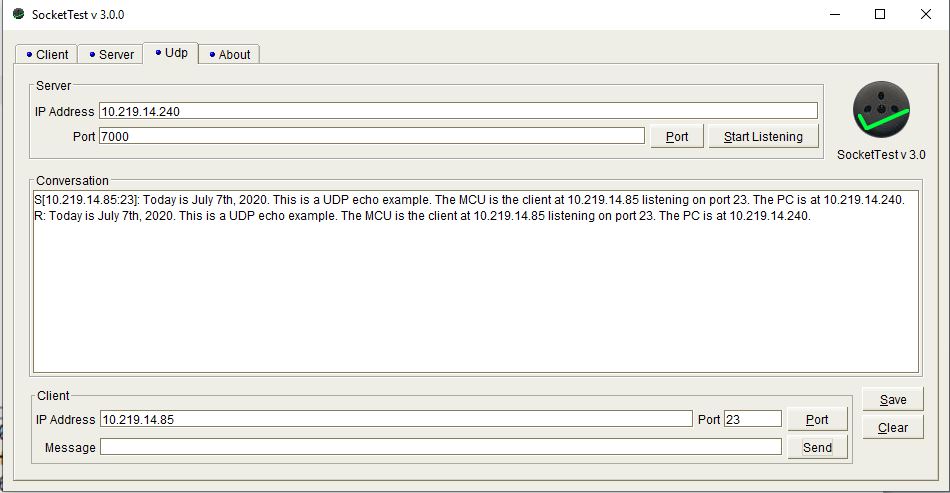
I wanted to transmit data to the udp_client using the udp_sendto function. The UARTprintf function prints the Send OK, but the data never reaches the client, as well as the echo of the client works fine. The data from the server side is not displayed over the client side.
//*****************************************************************************
//
// enet_lwip.c - Sample WebServer Application using lwIP.
//
// Copyright (c) 2013-2017 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Texas Instruments (TI) is supplying this software for use solely and
// exclusively on TI's microcontroller products. The software is owned by
// TI and/or its suppliers, and is protected under applicable copyright
// laws. You may not combine this software with "viral" open-source
// software in order to form a larger program.
//
// THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS.
// NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT
// NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY
// CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
// DAMAGES, FOR ANY REASON WHATSOEVER.
//
// This is part of revision 2.1.4.178 of the EK-TM4C1294XL Firmware Package.
//
//*****************************************************************************
#include <stdbool.h>
#include <stdint.h>
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "driverlib/flash.h"
#include "driverlib/interrupt.h"
#include "driverlib/gpio.h"
#include "driverlib/rom_map.h"
#include "driverlib/sysctl.h"
#include "driverlib/systick.h"
#include "utils/lwiplib.h"
#include "utils/ustdlib.h"
#include "utils/uartstdio.h"
#include "drivers/pinout.h"
#include "lwip/udp.h"
//*****************************************************************************
//
//! \addtogroup example_list
//! <h1>Ethernet with lwIP (enet_lwip)</h1>
//!
//! This example application demonstrates the operation of the Tiva
//! Ethernet controller using the lwIP TCP/IP Stack. DHCP is used to obtain
//! an Ethernet address. If DHCP times out without obtaining an address,
//! AutoIP will be used to obtain a link-local address. The address that is
//! selected will be shown on the UART.
//!
//! UART0, connected to the ICDI virtual COM port and running at 115,200,
//! 8-N-1, is used to display messages from this application. Use the
//! following command to re-build the any file system files that change.
//!
//! ../../../../tools/bin/makefsfile -i fs -o enet_fsdata.h -r -h -q
//!
//! For additional details on lwIP, refer to the lwIP web page at:
//! http://savannah.nongnu.org/projects/lwip/
//
//*****************************************************************************
//*****************************************************************************
//
// Defines for setting up the system clock.
//
//*****************************************************************************
#define SYSTICKHZ 100
#define SYSTICKMS (1000 / SYSTICKHZ)
//*****************************************************************************
//
// Interrupt priority definitions. The top 3 bits of these values are
// significant with lower values indicating higher priority interrupts.
//
//*****************************************************************************
#define SYSTICK_INT_PRIORITY 0x80
#define ETHERNET_INT_PRIORITY 0xC0
//*****************************************************************************
//
// The current IP address.
//
//*****************************************************************************
uint32_t g_ui32IPAddress;
//*****************************************************************************
//
// The system clock frequency.
//
//*****************************************************************************
uint32_t g_ui32SysClock;
//*****************************************************************************
//
// Volatile global flag to manage LED blinking, since it is used in interrupt
// and main application. The LED blinks at the rate of SYSTICKHZ.
//
//*****************************************************************************
volatile bool g_bLED;
/********************************** calixto **********************************/
#define CS_UDP_CONNECTION_LIVE 1
#define CS_UDP_CONNECTION_OFFLINE 0
//#define UDP_ACK_OK 1
//#define UDP_ACK_WAIT 0
char cs_udp_connection_status = CS_UDP_CONNECTION_OFFLINE;
struct udp_pcb *cs_pcb;
struct pbuf *cs_pbuf;
uint8_t udp_ready_flag=0,command_rec_flag=0;
//uint8_t tcp_ack = UDP_ACK_WAIT;
//*****************************************************************************
//*****************************************************************************
//
// The error routine that is called if the driver library encounters an error.
//
//*****************************************************************************
#ifdef DEBUG
void
__error__(char *pcFilename, uint32_t ui32Line)
{
}
#endif
void udp_echo_init( void );
//*****************************************************************************
//
// Display an lwIP type IP Address.
//
//*****************************************************************************
void
DisplayIPAddress(uint32_t ui32Addr)
{
char pcBuf[16];
//
// Convert the IP Address into a string.
//
usprintf(pcBuf, "%d.%d.%d.%d", ui32Addr & 0xff, (ui32Addr >> 8) & 0xff,
(ui32Addr >> 16) & 0xff, (ui32Addr >> 24) & 0xff);
//
// Display the string.
//
UARTprintf(pcBuf);
}
//*****************************************************************************
//
// Required by lwIP library to support any host-related timer functions.
//
//*****************************************************************************
void
lwIPHostTimerHandler(void)
{
uint32_t ui32NewIPAddress;
//
// Get the current IP address.
//
ui32NewIPAddress = lwIPLocalIPAddrGet();
//
// See if the IP address has changed.
//
if(ui32NewIPAddress != g_ui32IPAddress)
{
//
// See if there is an IP address assigned.
//
if(ui32NewIPAddress == 0xffffffff)
{
//
// Indicate that there is no link.
//
UARTprintf("Waiting for link.\n");
}
else if(ui32NewIPAddress == 0)
{
//
// There is no IP address, so indicate that the DHCP process is
// running.
//
UARTprintf("Waiting for IP address.\n");
}
else
{
//
// Display the new IP address.
//
UARTprintf("IP Address: ");
DisplayIPAddress(ui32NewIPAddress);
UARTprintf("\nEcho Server is ready.\n");
udp_ready_flag=1;
}
//
// Save the new IP address.
//
g_ui32IPAddress = ui32NewIPAddress;
}
//
// If there is not an IP address.
//
if((ui32NewIPAddress == 0) || (ui32NewIPAddress == 0xffffffff))
{
//
// Do nothing and keep waiting.
//
}
// Calixto
cs_udp_connection_status = CS_UDP_CONNECTION_LIVE;
}
//*****************************************************************************
//
// The interrupt handler for the SysTick interrupt.
//
//*****************************************************************************
void
SysTickIntHandler(void)
{
//
// Call the lwIP timer handler.
//
lwIPTimer(SYSTICKMS);
//
// Tell the application to change the state of the LED (in other words
// blink).
//
g_bLED = true;
}
char udp_tx_buffer[512];
void Data_Filling()
{
uint16_t j;
udp_tx_buffer[0]='{';
for(j=1; j < 501; j++)
{
udp_tx_buffer[j] = 'a';
}
udp_tx_buffer[502]='}';
}
//*****************************************************************************
//
// This example demonstrates the use of the Ethernet Controller.
//
//*****************************************************************************
int
main(void)
{
uint32_t ui32User0, ui32User1;
uint8_t pui8MACArray[8];
#define LWIP_DHCP 0
#define LWIP_AUTOIP 0
//uint32_t cs_ipaddr=0, cs_subnet=0, cs_gateway=0;
struct ip_addr cs_ipaddr, cs_subnet, cs_gateway;
IP4_ADDR(&cs_ipaddr,3,0,168,192);
IP4_ADDR(&cs_subnet,0,255,255,255);
IP4_ADDR(&cs_gateway,1,0,168,192);
struct ip_addr dest_ip;
IP4_ADDR(&dest_ip,2,0,168,192);
uint8_t cs_remote_conn_flag=0;
ip_addr_t cs_remote_ip_addr_t;
IP4_ADDR(&cs_remote_ip_addr_t,2,0,168,192);
//
// Make sure the main oscillator is enabled because this is required by
// the PHY. The system must have a 25MHz crystal attached to the OSC
// pins. The SYSCTL_MOSC_HIGHFREQ parameter is used when the crystal
// frequency is 10MHz or higher.
//
SysCtlMOSCConfigSet(SYSCTL_MOSC_HIGHFREQ);
//
// Run from the PLL at 120 MHz.
//
g_ui32SysClock = MAP_SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ |
SYSCTL_OSC_MAIN |
SYSCTL_USE_PLL |
SYSCTL_CFG_VCO_480), 120000000);
//
// Configure the device pins.
//
//*****************************************************************************
//
//! Configures the device pins for the standard usages on the EK-TM4C1294XL.
//!
//! \param bEthernet is a boolean used to determine function of Ethernet pins.
//! If true Ethernet pins are configured as Ethernet LEDs. If false GPIO are
//! available for application use.
//! \param bUSB is a boolean used to determine function of USB pins. If true USB
//! pins are configured for USB use. If false then USB pins are available for
//! application use as GPIO.
//
//*****************************************************************************
// void
// PinoutSet(bool bEthernet, bool bUSB)
PinoutSet(true, false);
//
// Configure UART.
//
UARTStdioConfig(0, 115200, g_ui32SysClock);
//
// Clear the terminal and print banner.
//
//UARTprintf("\033[2J\033[H");
UARTprintf("Calixto lwIP udp echo example\n\n");
//
// Configure Port N1 for as an output for the animation LED.
//
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTN_BASE, GPIO_PIN_1);
//
// Initialize LED to OFF (0)
//
MAP_GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_1, ~GPIO_PIN_1);
//
// Configure SysTick for a periodic interrupt.
//
MAP_SysTickPeriodSet(g_ui32SysClock / SYSTICKHZ);
MAP_SysTickEnable();
MAP_SysTickIntEnable();
//
// Configure the hardware MAC address for Ethernet Controller filtering of
// incoming packets. The MAC address will be stored in the non-volatile
// USER0 and USER1 registers.
//
MAP_FlashUserGet(&ui32User0, &ui32User1);
if((ui32User0 == 0xffffffff) || (ui32User1 == 0xffffffff))
{
//
// We should never get here. This is an error if the MAC address has
// not been programmed into the device. Exit the program.
// Let the user know there is no MAC address
//
UARTprintf("No MAC programmed!\n");
while(1)
{
}
}
//
// Tell the user what we are doing just now.
//
UARTprintf("Waiting for IP.\n");
//
// Convert the 24/24 split MAC address from NV ram into a 32/16 split MAC
// address needed to program the hardware registers, then program the MAC
// address into the Ethernet Controller registers.
//
pui8MACArray[0] = ((ui32User0 >> 0) & 0xff);
pui8MACArray[1] = ((ui32User0 >> 8) & 0xff);
pui8MACArray[2] = ((ui32User0 >> 16) & 0xff);
pui8MACArray[3] = ((ui32User1 >> 0) & 0xff);
pui8MACArray[4] = ((ui32User1 >> 8) & 0xff);
pui8MACArray[5] = ((ui32User1 >> 16) & 0xff);
//
// Initialize the lwIP library, using DHCP.
//
//lwIPInit(g_ui32SysClock, pui8MACArray, 0, 0, 0, IPADDR_USE_DHCP);
lwIPInit(g_ui32SysClock, pui8MACArray, cs_ipaddr.addr, cs_subnet.addr, cs_gateway.addr, IPADDR_USE_STATIC);
//
// Initialize the echo server.
//Run the udpSendReceive Linux or Windows executable that is shipped with TI-RTOS.
//The executable is found in:
//<tirtos_install_dir>\packages\examples\tools\udpSendReceive
//Usage: ./udpSendReceive <IP-addr> <port> <id> -l[length] -s[sleep in uS]
//<IP-addr> is the IP address
//<port> is the UDP port being listened to (23)
//<id> is a unique id for the executable. Printed out when 1000 packets are
// transmitted. It allows the user to run multiple instances
// of udpSendReceive.
//Optional:
// -l[length] size of the packet in bytes. Default is 1024 bytes.
// -s[sleep in uS] usleep time to between sends. Default is 1000 uSecs.
//Example:
// udpSendReceive 192.168.1.5 23 1 -s100
//Messages such as the following will begin to appear on the terminal window when
//a UDP packet has been echoed back:
// Starting test with a 1000 uSec delay between transmits
// [id 1] count = 1000, time = 12
// [id 1] count = 2000, time = 24
// [id 1] count = 3000, time = 36
//
udp_echo_init();
//
// Set the interrupt priorities. We set the SysTick interrupt to a higher
// priority than the Ethernet interrupt to ensure that the file system
// tick is processed if SysTick occurs while the Ethernet handler is being
// processed. This is very likely since all the TCP/IP and HTTP work is
// done in the context of the Ethernet interrupt.
//
MAP_IntPrioritySet(INT_EMAC0, ETHERNET_INT_PRIORITY);
MAP_IntPrioritySet(FAULT_SYSTICK, SYSTICK_INT_PRIORITY);
//
// Loop forever, processing the LED blinking. All the work is done in
// interrupt handlers.
//
// Calixto
Data_Filling();
//udp_connect(cs_pcb, &cs_remote_ip_addr_t, 25);
// cs_pbuf->payload=udp_tx_buffer;
// cs_pbuf->len=600;
// cs_pbuf->next = NULL;
//dest_ip
//cs_pcb
while(1)
{
if((udp_ready_flag==1) && (command_rec_flag) == 1)
{
cs_pbuf = pbuf_alloc(PBUF_TRANSPORT, 512, PBUF_RAM);
cs_pbuf->payload=udp_tx_buffer;
cs_pbuf->tot_len = cs_pbuf->len = 512;
udp_sendto(cs_pcb, cs_pbuf, &dest_ip, 25);
if(udp_sendto(cs_pcb, cs_pbuf, &dest_ip, 25) == ERR_OK){
UARTprintf("\n\rSend ok");
pbuf_free(cs_pbuf); }
}
while(g_bLED == false)
{
}
//
// Clear the flag.
//
g_bLED = false;
//
// Toggle the LED.
//
MAP_GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_1,
(MAP_GPIOPinRead(GPIO_PORTN_BASE, GPIO_PIN_1) ^
GPIO_PIN_1));
}
}
void udp_echo_recv(void *arg, struct udp_pcb *pcb, struct pbuf *p, struct
ip_addr *addr, u16_t port)
{
if (p != NULL) {
/* send received packet back to sender */
udp_sendto(pcb, p, addr, port);
command_rec_flag=1;
/* free the pbuf */
pbuf_free(p);
}
}
void udp_echo_init(void)
{
struct udp_pcb * pcb;
/* get new pcb */
pcb = udp_new();
cs_pcb = udp_new();
if (pcb == NULL)
{
LWIP_DEBUGF(UDP_DEBUG, ("udp_new failed!\n"));
return;
}
/* bind to any IP address on port 23 */
if (udp_bind(pcb, IP_ADDR_ANY, 23) != ERR_OK)
{
LWIP_DEBUGF(UDP_DEBUG, ("udp_bind failed!\n"));
return;
}
/* set udp_echo_recv() as callback function
for received packets */
udp_recv(pcb, udp_echo_recv, NULL);
}