Hey Forum,
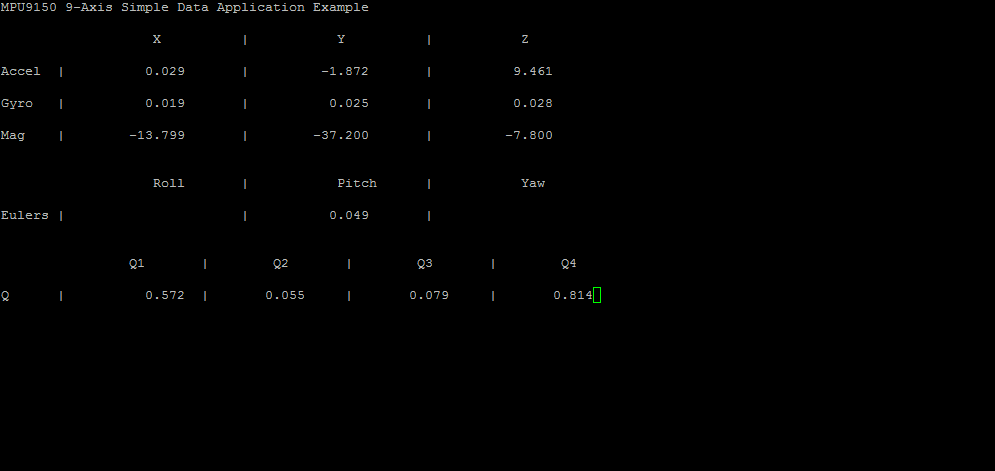
My issue is with using the UART output to the putty terminal. I was attempting to mimic the output of the demo sensorHub code displayed below....
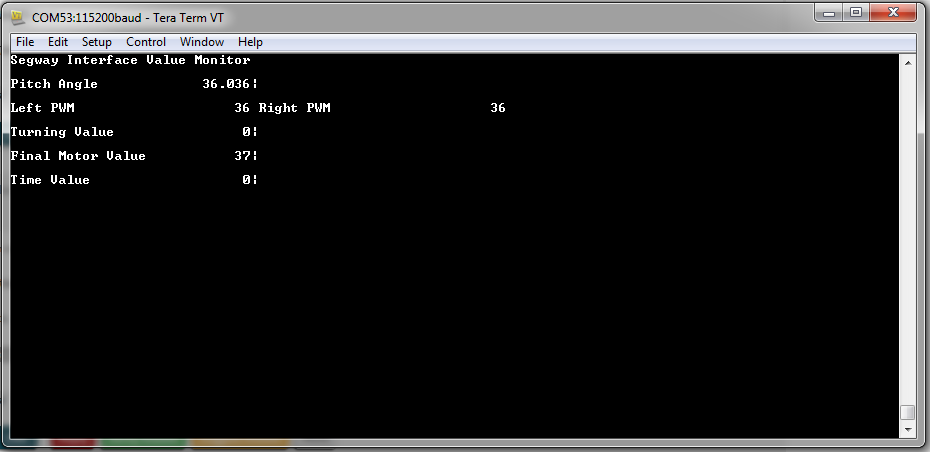
 I was trying to use the same format to display data from my own project (DIY Segway) but i was running into some issues. I have configured my UART the same but my output is not as near to the example. My output is shown below......
I was trying to use the same format to display data from my own project (DIY Segway) but i was running into some issues. I have configured my UART the same but my output is not as near to the example. My output is shown below......
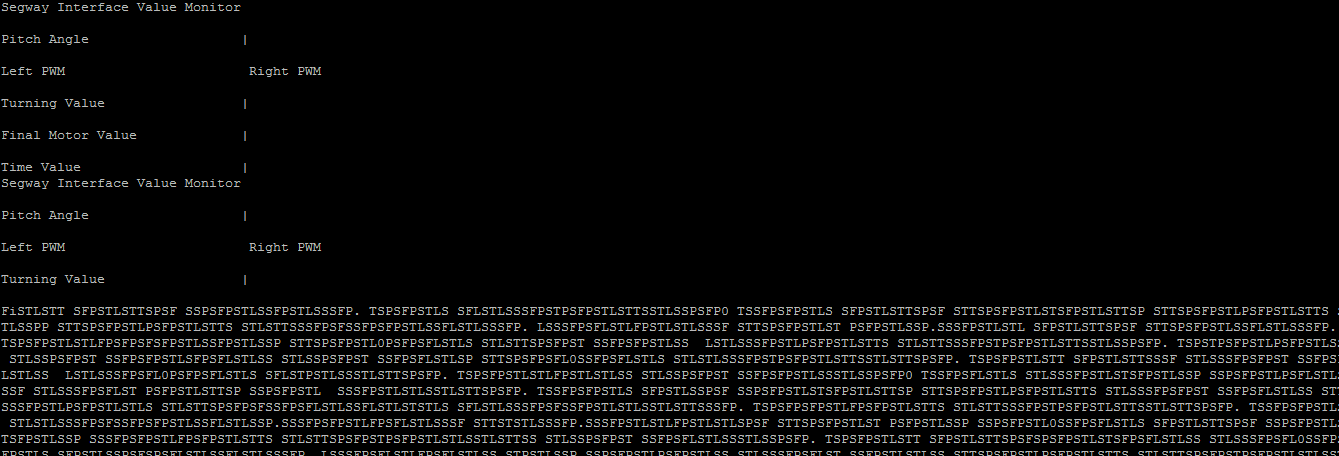 The value options repeat and then i believe my uart is overflowed with information. So what im am trying to achieve is a way to demonstrate my data without the UART constantly repeating the variable names and only updating the variable number.
The value options repeat and then i believe my uart is overflowed with information. So what im am trying to achieve is a way to demonstrate my data without the UART constantly repeating the variable names and only updating the variable number.
I have my code attached below and i have posted the sensor hub demo code as well.
MY CODE:
void initUart()
{
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
GPIOPinConfigure(GPIO_PA0_U0RX);
GPIOPinConfigure(GPIO_PA1_U0TX);
GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
UARTClockSourceSet(UART0_BASE, UART_CLOCK_PIOSC);
UARTStdioConfig(0, 115200, 16000000);
}
void outputData(int LeftPWM, int RightPWM, int turningVal, int timeVal, int finalMotorVal,int pitchVal, int pitchDeci)
{
UARTprintf("\033[2J\033[H");
UARTprintf("Segway Interface Value Monitor\n\n");
UARTprintf("Pitch Angle\033[31G|\n\n");//accel
UARTprintf("Left PWM\033[31G Right PWM\n\n");//[54G|
UARTprintf("Turning Value\033[31G|\n\n");
UARTprintf("Final Motor Value\033[31G|\n\n");
UARTprintf("Time Value\033[31G|\n\n");
g_ui32PrintSkipCounter++;
if(g_ui32PrintSkipCounter >= PRINT_SKIP_COUNT)
{
//
// Reset skip counter.
//
g_ui32PrintSkipCounter = 0;
UARTprintf("\033[5;17H%3d.%03d", pitchVal, pitchDeci);
UARTprintf("\033[7;17H%3d %3d", LeftPWM, RightPWM);
UARTprintf("\033[9;17H%3d", turningVal);
UARTprintf("\033[19;14H%3d", finalMotorVal);
UARTprintf("\033[19;17H%3d", timeVal);
}
}
SENSORHUB CODE:
//*****************************************************************************
//
// compdcm_mpu9150.c - Example use of the SensorLib with the MPU9150
//
// Copyright (c) 2013-2015 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Texas Instruments (TI) is supplying this software for use solely and
// exclusively on TI's microcontroller products. The software is owned by
// TI and/or its suppliers, and is protected under applicable copyright
// laws. You may not combine this software with "viral" open-source
// software in order to form a larger program.
//
// THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS.
// NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT
// NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY
// CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
// DAMAGES, FOR ANY REASON WHATSOEVER.
//
// This is part of revision 2.1.2.111 of the EK-TM4C123GXL Firmware Package.
//
//*****************************************************************************
#include <stdint.h>
#include <stdbool.h>
#include "inc/hw_memmap.h"
#include "inc/hw_ints.h"
#include "driverlib/debug.h"
#include "driverlib/gpio.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/rom.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "utils/uartstdio.h"
#include "sensorlib/hw_mpu9150.h"
#include "sensorlib/hw_ak8975.h"
#include "sensorlib/i2cm_drv.h"
#include "sensorlib/ak8975.h"
#include "sensorlib/mpu9150.h"
#include "sensorlib/comp_dcm.h"
#include "drivers/rgb.h"
//*****************************************************************************
//
//! \addtogroup example_list
//! <h1>Nine Axis Sensor Fusion with the MPU9150 and Complimentary-Filtered
//! DCM (compdcm_mpu9150)</h1>
//!
//! This example demonstrates the basic use of the Sensor Library, TM4C123G
//! LaunchPad and SensHub BoosterPack to obtain nine axis motion measurements
//! from the MPU9150. The example fuses the nine axis measurements into a set
//! of Euler angles: roll, pitch and yaw. It also produces the rotation
//! quaternions. The fusion mechanism demonstrated is complimentary-filtered
//! direct cosine matrix (DCM) algorithm is provided as part of the Sensor
//! Library.
//!
//! Connect a serial terminal program to the LaunchPad's ICDI virtual serial
//! port at 115,200 baud. Use eight bits per byte, no parity and one stop bit.
//! The raw sensor measurements, Euler angles and quaternions are printed to
//! the terminal. The RGB LED begins to blink at 1Hz after initialization is
//! completed and the example application is running.
//
//*****************************************************************************
//*****************************************************************************
//
// Define MPU9150 I2C Address.
//
//*****************************************************************************
#define MPU9150_I2C_ADDRESS 0x68
//*****************************************************************************
//
// Global array for holding the color values for the RGB.
//
//*****************************************************************************
uint32_t g_pui32Colors[3];
//*****************************************************************************
//
// Global instance structure for the I2C master driver.
//
//*****************************************************************************
tI2CMInstance g_sI2CInst;
//*****************************************************************************
//
// Global instance structure for the ISL29023 sensor driver.
//
//*****************************************************************************
tMPU9150 g_sMPU9150Inst;
//*****************************************************************************
//
// Global Instance structure to manage the DCM state.
//
//*****************************************************************************
tCompDCM g_sCompDCMInst;
//*****************************************************************************
//
// Global flags to alert main that MPU9150 I2C transaction is complete
//
//*****************************************************************************
volatile uint_fast8_t g_vui8I2CDoneFlag;
//*****************************************************************************
//
// Global flags to alert main that MPU9150 I2C transaction error has occurred.
//
//*****************************************************************************
volatile uint_fast8_t g_vui8ErrorFlag;
//*****************************************************************************
//
// Global flags to alert main that MPU9150 data is ready to be retrieved.
//
//*****************************************************************************
volatile uint_fast8_t g_vui8DataFlag;
//*****************************************************************************
//
// Global counter to control and slow down the rate of data to the terminal.
//
//*****************************************************************************
#define PRINT_SKIP_COUNT 10
uint32_t g_ui32PrintSkipCounter;
//*****************************************************************************
//
// The error routine that is called if the driver library encounters an error.
//
//*****************************************************************************
#ifdef DEBUG
void
__error__(char *pcFilename, uint32_t ui32Line)
{
}
#endif
//*****************************************************************************
//
// MPU9150 Sensor callback function. Called at the end of MPU9150 sensor
// driver transactions. This is called from I2C interrupt context. Therefore,
// we just set a flag and let main do the bulk of the computations and display.
//
//*****************************************************************************
void
MPU9150AppCallback(void *pvCallbackData, uint_fast8_t ui8Status)
{
//
// If the transaction succeeded set the data flag to indicate to
// application that this transaction is complete and data may be ready.
//
if(ui8Status == I2CM_STATUS_SUCCESS)
{
g_vui8I2CDoneFlag = 1;
}
//
// Store the most recent status in case it was an error condition
//
g_vui8ErrorFlag = ui8Status;
}
//*****************************************************************************
//
// Called by the NVIC as a result of GPIO port B interrupt event. For this
// application GPIO port B pin 2 is the interrupt line for the MPU9150
//
//*****************************************************************************
void
IntGPIOb(void)
{
unsigned long ulStatus;
ulStatus = GPIOIntStatus(GPIO_PORTB_BASE, true);
//
// Clear all the pin interrupts that are set
//
GPIOIntClear(GPIO_PORTB_BASE, ulStatus);
if(ulStatus & GPIO_PIN_2)
{
//
// MPU9150 Data is ready for retrieval and processing.
//
MPU9150DataRead(&g_sMPU9150Inst, MPU9150AppCallback, &g_sMPU9150Inst);
}
}
//*****************************************************************************
//
// Called by the NVIC as a result of I2C3 Interrupt. I2C3 is the I2C connection
// to the MPU9150.
//
//*****************************************************************************
void
MPU9150I2CIntHandler(void)
{
//
// Pass through to the I2CM interrupt handler provided by sensor library.
// This is required to be at application level so that I2CMIntHandler can
// receive the instance structure pointer as an argument.
//
I2CMIntHandler(&g_sI2CInst);
}
//*****************************************************************************
//
// MPU9150 Application error handler. Show the user if we have encountered an
// I2C error.
//
//*****************************************************************************
void
MPU9150AppErrorHandler(char *pcFilename, uint_fast32_t ui32Line)
{
//
// Set terminal color to red and print error status and locations
//
UARTprintf("\033[31;1m");
UARTprintf("Error: %d, File: %s, Line: %d\n"
"See I2C status definitions in sensorlib\\i2cm_drv.h\n",
g_vui8ErrorFlag, pcFilename, ui32Line);
//
// Return terminal color to normal
//
UARTprintf("\033[0m");
//
// Set RGB Color to RED
//
g_pui32Colors[0] = 0xFFFF;
g_pui32Colors[1] = 0;
g_pui32Colors[2] = 0;
RGBColorSet(g_pui32Colors);
//
// Increase blink rate to get attention
//
RGBBlinkRateSet(10.0f);
//
// Go to sleep wait for interventions. A more robust application could
// attempt corrective actions here.
//
while(1)
{
//
// Do Nothing
//
}
}
//*****************************************************************************
//
// Function to wait for the MPU9150 transactions to complete. Use this to spin
// wait on the I2C bus.
//
//*****************************************************************************
void
MPU9150AppI2CWait(char *pcFilename, uint_fast32_t ui32Line)
{
//
// Put the processor to sleep while we wait for the I2C driver to
// indicate that the transaction is complete.
//
while((g_vui8I2CDoneFlag == 0) && (g_vui8ErrorFlag == 0))
{
//
// Do Nothing
//
}
//
// If an error occurred call the error handler immediately.
//
if(g_vui8ErrorFlag)
{
MPU9150AppErrorHandler(pcFilename, ui32Line);
}
//
// clear the data flag for next use.
//
g_vui8I2CDoneFlag = 0;
}
//*****************************************************************************
//
// Configure the UART and its pins. This must be called before UARTprintf().
//
//*****************************************************************************
void
ConfigureUART(void)
{
//
// Enable the GPIO Peripheral used by the UART.
//
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
//
// Enable UART0
//
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
//
// Configure GPIO Pins for UART mode.
//
ROM_GPIOPinConfigure(GPIO_PA0_U0RX);
ROM_GPIOPinConfigure(GPIO_PA1_U0TX);
ROM_GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
//
// Use the internal 16MHz oscillator as the UART clock source.
//
UARTClockSourceSet(UART0_BASE, UART_CLOCK_PIOSC);
//
// Initialize the UART for console I/O.
//
UARTStdioConfig(0, 115200, 16000000);
}
//*****************************************************************************
//
// Main application entry point.
//
//*****************************************************************************
int
main(void)
{
int_fast32_t i32IPart[16], i32FPart[16];
uint_fast32_t ui32Idx, ui32CompDCMStarted;
float pfData[16];
float *pfAccel, *pfGyro, *pfMag, *pfEulers, *pfQuaternion;
//
// Initialize convenience pointers that clean up and clarify the code
// meaning. We want all the data in a single contiguous array so that
// we can make our pretty printing easier later.
//
pfAccel = pfData;
pfGyro = pfData + 3;
pfMag = pfData + 6;
pfEulers = pfData + 9;
pfQuaternion = pfData + 12;
//
// Setup the system clock to run at 40 Mhz from PLL with crystal reference
//
ROM_SysCtlClockSet(SYSCTL_SYSDIV_5 | SYSCTL_USE_PLL | SYSCTL_XTAL_16MHZ |
SYSCTL_OSC_MAIN);
//
// Enable port B used for motion interrupt.
//
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB);
//
// Initialize the UART.
//
ConfigureUART();
//
// Print the welcome message to the terminal.
//
UARTprintf("\033[2JMPU9150 Raw Example\n");
//
// Set the color to a purple approximation.
//
g_pui32Colors[RED] = 0x8000;
g_pui32Colors[BLUE] = 0x8000;
g_pui32Colors[GREEN] = 0x0000;
//
// Initialize RGB driver.
//
RGBInit(0);
RGBColorSet(g_pui32Colors);
RGBIntensitySet(0.5f);
RGBEnable();
//
// The I2C3 peripheral must be enabled before use.
//
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C3);
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD);
//
// Configure the pin muxing for I2C3 functions on port D0 and D1.
//
ROM_GPIOPinConfigure(GPIO_PD0_I2C3SCL);
ROM_GPIOPinConfigure(GPIO_PD1_I2C3SDA);
//
// Select the I2C function for these pins. This function will also
// configure the GPIO pins pins for I2C operation, setting them to
// open-drain operation with weak pull-ups. Consult the data sheet
// to see which functions are allocated per pin.
//
GPIOPinTypeI2CSCL(GPIO_PORTD_BASE, GPIO_PIN_0);
ROM_GPIOPinTypeI2C(GPIO_PORTD_BASE, GPIO_PIN_1);
//
// Configure and Enable the GPIO interrupt. Used for INT signal from the
// MPU9150
//
ROM_GPIOPinTypeGPIOInput(GPIO_PORTB_BASE, GPIO_PIN_2);
GPIOIntEnable(GPIO_PORTB_BASE, GPIO_PIN_2);
ROM_GPIOIntTypeSet(GPIO_PORTB_BASE, GPIO_PIN_2, GPIO_FALLING_EDGE);
ROM_IntEnable(INT_GPIOB);
//
// Keep only some parts of the systems running while in sleep mode.
// GPIOB is for the MPU9150 interrupt pin.
// UART0 is the virtual serial port
// TIMER0, TIMER1 and WTIMER5 are used by the RGB driver
// I2C3 is the I2C interface to the ISL29023
//
ROM_SysCtlPeripheralClockGating(true);
ROM_SysCtlPeripheralSleepEnable(SYSCTL_PERIPH_GPIOB);
ROM_SysCtlPeripheralSleepEnable(SYSCTL_PERIPH_UART0);
ROM_SysCtlPeripheralSleepEnable(SYSCTL_PERIPH_TIMER0);
ROM_SysCtlPeripheralSleepEnable(SYSCTL_PERIPH_TIMER1);
ROM_SysCtlPeripheralSleepEnable(SYSCTL_PERIPH_I2C3);
ROM_SysCtlPeripheralSleepEnable(SYSCTL_PERIPH_WTIMER5);
//
// Enable interrupts to the processor.
//
ROM_IntMasterEnable();
//
// Initialize I2C3 peripheral.
//
I2CMInit(&g_sI2CInst, I2C3_BASE, INT_I2C3, 0xff, 0xff,
ROM_SysCtlClockGet());
//
// Initialize the MPU9150 Driver.
//
MPU9150Init(&g_sMPU9150Inst, &g_sI2CInst, MPU9150_I2C_ADDRESS,
MPU9150AppCallback, &g_sMPU9150Inst);
//
// Wait for transaction to complete
//
MPU9150AppI2CWait(__FILE__, __LINE__);
//
// Write application specifice sensor configuration such as filter settings
// and sensor range settings.
//
g_sMPU9150Inst.pui8Data[0] = MPU9150_CONFIG_DLPF_CFG_94_98;
g_sMPU9150Inst.pui8Data[1] = MPU9150_GYRO_CONFIG_FS_SEL_250;
g_sMPU9150Inst.pui8Data[2] = (MPU9150_ACCEL_CONFIG_ACCEL_HPF_5HZ |
MPU9150_ACCEL_CONFIG_AFS_SEL_2G);
MPU9150Write(&g_sMPU9150Inst, MPU9150_O_CONFIG, g_sMPU9150Inst.pui8Data, 3,
MPU9150AppCallback, &g_sMPU9150Inst);
//
// Wait for transaction to complete
//
MPU9150AppI2CWait(__FILE__, __LINE__);
//
// Configure the data ready interrupt pin output of the MPU9150.
//
g_sMPU9150Inst.pui8Data[0] = MPU9150_INT_PIN_CFG_INT_LEVEL |
MPU9150_INT_PIN_CFG_INT_RD_CLEAR |
MPU9150_INT_PIN_CFG_LATCH_INT_EN;
g_sMPU9150Inst.pui8Data[1] = MPU9150_INT_ENABLE_DATA_RDY_EN;
MPU9150Write(&g_sMPU9150Inst, MPU9150_O_INT_PIN_CFG,
g_sMPU9150Inst.pui8Data, 2, MPU9150AppCallback,
&g_sMPU9150Inst);
//
// Wait for transaction to complete
//
MPU9150AppI2CWait(__FILE__, __LINE__);
//
// Initialize the DCM system. 50 hz sample rate.
// accel weight = .2, gyro weight = .8, mag weight = .2
//
CompDCMInit(&g_sCompDCMInst, 1.0f / 50.0f, 0.2f, 0.6f, 0.2f);
UARTprintf("\033[2J\033[H");
UARTprintf("MPU9150 9-Axis Simple Data Application Example\n\n");
UARTprintf("\033[20GX\033[31G|\033[43GY\033[54G|\033[66GZ\n\n");
UARTprintf("Accel\033[8G|\033[31G|\033[54G|\n\n");
UARTprintf("Gyro\033[8G|\033[31G|\033[54G|\n\n");
UARTprintf("Mag\033[8G|\033[31G|\033[54G|\n\n");
UARTprintf("\n\033[20GRoll\033[31G|\033[43GPitch\033[54G|\033[66GYaw\n\n");
UARTprintf("Eulers\033[8G|\033[31G|\033[54G|\n\n");
UARTprintf("\n\033[17GQ1\033[26G|\033[35GQ2\033[44G|\033[53GQ3\033[62G|"
"\033[71GQ4\n\n");
UARTprintf("Q\033[8G|\033[26G|\033[44G|\033[62G|\n\n");
//
// Enable blinking indicates config finished successfully
//
RGBBlinkRateSet(1.0f);
ui32CompDCMStarted = 0;
while(1)
{
//
// Go to sleep mode while waiting for data ready.
//
while(!g_vui8I2CDoneFlag)
{
ROM_SysCtlSleep();
}
//
// Clear the flag
//
g_vui8I2CDoneFlag = 0;
//
// Get floating point version of the Accel Data in m/s^2.
//
MPU9150DataAccelGetFloat(&g_sMPU9150Inst, pfAccel, pfAccel + 1,
pfAccel + 2);
//
// Get floating point version of angular velocities in rad/sec
//
MPU9150DataGyroGetFloat(&g_sMPU9150Inst, pfGyro, pfGyro + 1,
pfGyro + 2);
//
// Get floating point version of magnetic fields strength in tesla
//
MPU9150DataMagnetoGetFloat(&g_sMPU9150Inst, pfMag, pfMag + 1,
pfMag + 2);
//
// Check if this is our first data ever.
//
if(ui32CompDCMStarted == 0)
{
//
// Set flag indicating that DCM is started.
// Perform the seeding of the DCM with the first data set.
//
ui32CompDCMStarted = 1;
CompDCMMagnetoUpdate(&g_sCompDCMInst, pfMag[0], pfMag[1],
pfMag[2]);
CompDCMAccelUpdate(&g_sCompDCMInst, pfAccel[0], pfAccel[1],
pfAccel[2]);
CompDCMGyroUpdate(&g_sCompDCMInst, pfGyro[0], pfGyro[1],
pfGyro[2]);
CompDCMStart(&g_sCompDCMInst);
}
else
{
//
// DCM Is already started. Perform the incremental update.
//
CompDCMMagnetoUpdate(&g_sCompDCMInst, pfMag[0], pfMag[1],
pfMag[2]);
CompDCMAccelUpdate(&g_sCompDCMInst, pfAccel[0], pfAccel[1],
pfAccel[2]);
CompDCMGyroUpdate(&g_sCompDCMInst, -pfGyro[0], -pfGyro[1],
-pfGyro[2]);
CompDCMUpdate(&g_sCompDCMInst);
}
//
// Increment the skip counter. Skip counter is used so we do not
// overflow the UART with data.
//
g_ui32PrintSkipCounter++;
if(g_ui32PrintSkipCounter >= PRINT_SKIP_COUNT)
{
//
// Reset skip counter.
//
g_ui32PrintSkipCounter = 0;
//
// Get Euler data. (Roll Pitch Yaw)
//
CompDCMComputeEulers(&g_sCompDCMInst, pfEulers, pfEulers + 1,
pfEulers + 2);
//
// Get Quaternions.
//
CompDCMComputeQuaternion(&g_sCompDCMInst, pfQuaternion);
//
// convert mag data to micro-tesla for better human interpretation.
//
pfMag[0] *= 1e6;
pfMag[1] *= 1e6;
pfMag[2] *= 1e6;
//
// Convert Eulers to degrees. 180/PI = 57.29...
// Convert Yaw to 0 to 360 to approximate compass headings.
//
pfEulers[0] *= 57.295779513082320876798154814105f;
pfEulers[1] *= 57.295779513082320876798154814105f;
pfEulers[2] *= 57.295779513082320876798154814105f;
if(pfEulers[2] < 0)
{
pfEulers[2] += 360.0f;
}
//
// Now drop back to using the data as a single array for the
// purpose of decomposing the float into a integer part and a
// fraction (decimal) part.
//
for(ui32Idx = 0; ui32Idx < 16; ui32Idx++)
{
//
// Conver float value to a integer truncating the decimal part.
//
i32IPart[ui32Idx] = (int32_t) pfData[ui32Idx];
//
// Multiply by 1000 to preserve first three decimal values.
// Truncates at the 3rd decimal place.
//
i32FPart[ui32Idx] = (int32_t) (pfData[ui32Idx] * 1000.0f);
//
// Subtract off the integer part from this newly formed decimal
// part.
//
i32FPart[ui32Idx] = i32FPart[ui32Idx] -
(i32IPart[ui32Idx] * 1000);
//
// make the decimal part a positive number for display.
//
if(i32FPart[ui32Idx] < 0)
{
i32FPart[ui32Idx] *= -1;
}
}
//
// Print the acceleration numbers in the table.
//
UARTprintf("\033[5;17H%3d.%03d", i32IPart[0], i32FPart[0]);
UARTprintf("\033[5;40H%3d.%03d", i32IPart[1], i32FPart[1]);
UARTprintf("\033[5;63H%3d.%03d", i32IPart[2], i32FPart[2]);
//
// Print the angular velocities in the table.
//
UARTprintf("\033[7;17H%3d.%03d", i32IPart[3], i32FPart[3]);
UARTprintf("\033[7;40H%3d.%03d", i32IPart[4], i32FPart[4]);
UARTprintf("\033[7;63H%3d.%03d", i32IPart[5], i32FPart[5]);
//
// Print the magnetic data in the table.
//
UARTprintf("\033[9;17H%3d.%03d", i32IPart[6], i32FPart[6]);
UARTprintf("\033[9;40H%3d.%03d", i32IPart[7], i32FPart[7]);
UARTprintf("\033[9;63H%3d.%03d", i32IPart[8], i32FPart[8]);
//
// Print the Eulers in a table.
//
// UARTprintf("\033[14;17H%3d.%03d", i32IPart[9], i32FPart[9]);
UARTprintf("\033[14;40H%3d.%03d", i32IPart[10], i32FPart[10]);
// UARTprintf("\033[14;63H%3d.%03d", i32IPart[11], i32FPart[11]);
//
// Print the quaternions in a table format.
//
UARTprintf("\033[19;17H%3d.%03d", i32IPart[12], i32FPart[12]);
UARTprintf("\033[19;32H%3d.%03d", i32IPart[13], i32FPart[13]);
UARTprintf("\033[19;50H%3d.%03d", i32IPart[14], i32FPart[14]);
UARTprintf("\033[19;68H%3d.%03d", i32IPart[15], i32FPart[15]);
}
}
}
I hope my post is clear enough to understand! Please Help!